具現化AIとは何か──物理的身体が知能を生む
人工知能研究は長らくソフトウェア上の推論能力に焦点を当ててきた。しかし近年、物理的な身体を持ち、実環境との相互作用を通じて学習するアプローチが注目を集めている。これが具現化AI(Embodied AI)である。
具現化AIでは、ロボットなどの物理エージェントがセンサーで環境を感知し、アクチュエータで働きかけ、その結果をフィードバックとして受け取る。この一連のサイクルが知能の基盤となる。従来の認知モデルが身体を無視しがちだったのに対し、具現化アプローチでは身体の形態やセンサー構成そのものが認知能力に不可欠と考える。
身体性(Embodiment)の強さは、エージェントが環境のどれだけを感知・操作できるかという「身体の度合い」と、身体的経験と心的過程・環境がどれほど絡み合っているかという二軸で特徴づけられる。この枠組みの中で、いま急速に関心を集めているのが「時間意識」というテーマである。
時間意識とは──主観的な時間の経過をどう認識するか
時間意識(Temporal Awareness)とは、時間の経過や時間間隔を主観的に認識する能力を指す。「何秒が経過したか」という判断から、過去・現在・未来の統合的な認識までを含む広い概念である。
内部時計モデルの限界
伝統的には、脳内に仮想的なパルス発生装置を仮定するスカラータイミング理論(内部時計モデル)が主流だった。パルスの蓄積量で時間を推定するというシンプルな仕組みである。しかし、感情の高ぶりや注意の集中度合いによって時間感覚が大きく変動する現象をこのモデルだけでは説明しきれない。
そこで注意ゲートモデルやワーキングメモリモデル、状態依存ネットワークモデルなど複数の代替理論が提案されてきた。そして近年、これらを超える視点として「身体が時間知覚に直接関与する」という仮説が浮上している。
時間の具現化仮説
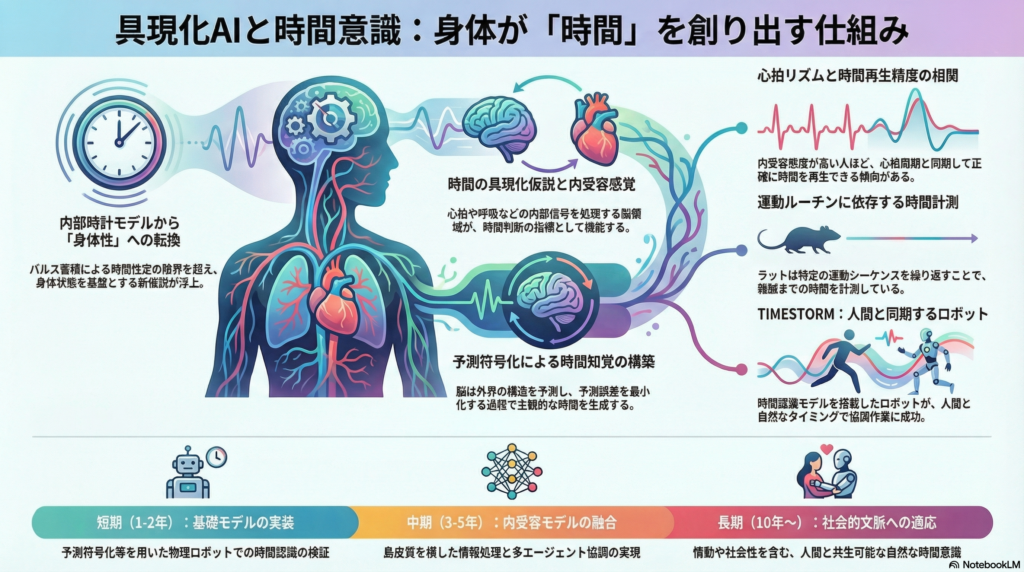
島皮質や前帯状皮質といった脳領域は、心拍や呼吸などの内受容情報を処理する中枢でもある。これらの身体内部信号が時間判断の手がかりとして使われているのではないかという考え方が「時間の具現化モデル」である。感覚運動系のフィードバックや内臓感覚への気づきが、時間認知を支える隠れた基盤となっている可能性がある。
センサーモーターループと予測符号化──理論的枠組み
具現化AIにおける時間意識を理解するには、二つの理論的柱が重要になる。
センサーモーターループの役割
身体を持つエージェントでは「感覚入力→中枢処理→運動出力→環境変化→感覚入力」というサイクルが絶えず回り続ける。ロボット制御では、このループを通じて予測と観測の誤差を修正し続けることが適応的行動の鍵となる。身体性が強いほどループの応答は高速化し、リアルタイム性の高い知覚・行動が可能になる。
このサイクルは単なる制御機構にとどまらない。時間的に連鎖する感覚と運動の流れそのものが、エージェントの内部に時間構造の表現を形成する土台になると考えられている。
予測符号化による時間知覚の説明
予測符号化(Predictive Coding)の枠組みでは、脳は外界の時間的構造を常に予測し、予測誤差を最小化する形で時間知覚を実現するとされる。主観的な時間は「推定した外界情報と先行知識のベイズ的統合の結果」として説明され、能動的な運動が時間知覚を圧縮または拡張させるという実験結果もこの枠組みと整合する。
マルチセンソリー統合や時間適応効果といった多様な時間の歪み現象も、予測符号化の観点から統一的に理解できる可能性がある。
実験的証拠──心拍・運動ルーチン・VRが示す身体と時間の関係
理論だけでなく、実験研究でも身体性と時間知覚の結びつきが繰り返し確認されている。
心拍リズムが時間再生精度に影響する
ヒトを対象とした研究では、0.5秒から40秒の時間間隔を再生する課題中に心拍を計測したところ、心拍サイクルと再生応答の間に位相同期が観察された。内受容感度(自分の心拍をどれだけ正確に感じ取れるか)が高い人ほど、時間再生の精度が向上する傾向も報告されている。心臓のリズムという身体内部の信号が、時間認知の入力として機能していることを示唆する結果である。
外的手がかりが乏しいとき、内受容感覚が時間精度を補う
別の研究では、刺激の配列が規則的な条件と不規則な条件で時間再生課題を実施し、被験者の内受容感覚への自覚度を評価した。興味深いことに、不規則条件(外的手がかりが不明瞭な状況)においてのみ、内受容覚知が高い人の時間推定精度が統計的に高かった。外部情報が不足する場面では、身体内部の感覚が時間判断を補完する可能性を示す結果といえる。
ラットの運動ルーチンが時間計測を支える
動物実験では、トレッドミル上のラットが固定時間後に報酬地点へ到達する課題が行われた。ラットは一定の運動シーケンス(後退と前進を繰り返すルーチンなど)を形成することで時間を計測しており、環境条件を変えてそのルーチンが崩れると正確なタイミング行動が失われた。内蔵時計に頼る戦略ではなく、身体運動に依存したタイミング戦略が採用されていたことが強化学習モデルの解析から示されている。
VR環境での時間同期と身体帰属感
VR実験では、不自然な形状のアバター(肘関節が逆方向に曲がる)であっても、動作と表示の時間的同期が保たれていれば身体帰属感が有意に増大することが確認された。空間的な一致性が損なわれても、時間的一致性が身体性の成立を支えるという注目すべき知見である。
ロボットへの実装──RNN・予測モデル・TIMESTORMプロジェクト
これらの知見をロボットに実装する試みも進んでいる。
時系列学習アルゴリズムの活用
ロボティクスでは、再帰型ニューラルネットワーク(RNN)やLSTM、エコーステートネットワークが時間パターン認識に広く用いられている。可塑性や注意、記憶などのパラメータを組み込むことで、幅広い時間推定の個人差を再現する試みも報告されている。予測符号化やアクティブインファレンスを組み込んだモデルでは、ロボットが次の感覚入力を予測し、誤差で内部モデルを更新する仕組みが構築されている。
TIMESTORMの協調ロボット実験
TIMESTORMプロジェクトでは、人間の時間認識モデルに基づく認知アーキテクチャをロボットに実装し、協調作業タスクでの有効性が検証された。時間認識能力を持つロボットがタスク完了タイミングを人間と同期させることで、自然な協働が実現したと報告されている。
評価指標の現状
時間的気づきの評価には、時間再生誤差(平均絶対誤差や変動係数)、タスク成功率、予測誤差量、位相同期指数などが用いられる。しかし主観的な時間体験の定量化指標は標準化が進んでおらず、今後の課題として残されている。
今後の研究ロードマップ──短期・中期・長期の展望
短期(1〜2年):基礎モデルの実装と比較検証
既存の時間認識モデル(RNN、スパイキングニューラルネットワーク、予測符号化)をロボットに実装し、物理ロボットとシミュレーション環境での性能差を検証する段階である。センサーモーターループを活用した基礎実験を通じて、身体センサーの有用性を定量的に評価することが求められる。
中期(3〜5年):内受容モデルの融合とHRI実験
島皮質に相当する情報処理機構など、人間の脳にインスパイアされた内受容モデルの開発が期待される。タイミング機能を協調タスクに適用する多エージェントシステムの研究も進むだろう。高次認知プロセスと時間知覚を統合したアーキテクチャの構築が中期的な目標となる。
長期(10年以上):社会的文脈での自然な時間意識
最終的には、社会的・情動的コンテキストの中で自然な時間意識を持つロボットの実現を目指す。協働ロボットの時間的柔軟性や自律的な時間管理能力が、人間と共生するAIの重要な要件になると考えられる。
まとめ
具現化AIにおける時間意識研究は、心理学・神経科学とロボティクスの交差点に位置する新しい学際領域である。心拍リズムや運動ルーチンが時間知覚に関与するという実験的証拠は、内部時計モデルだけでは捉えきれない身体と時間の深い結びつきを示している。センサーモーターループと予測符号化という理論的枠組みは、この現象を統一的に理解する手がかりを提供する。
ロボットへの実装はまだ初期段階にあるが、TIMESTORMプロジェクトのような先駆的取り組みが協調タスクでの有効性を示しつつある。今後は内受容モデルの融合や評価指標の標準化を経て、社会的文脈で時間意識を持つ自律ロボットの実現へと研究が進展していくことが期待される。
コメント