なぜ「脳の時空間モデル」が意識研究で注目されているのか
脳科学は長らく「どの領域がどの機能を担うか」という問いを中心に発展してきた。しかし近年、意識水準・自己関連処理・安静時と課題遂行時の相互作用といった現象は、局所領域の活動量だけでは十分に説明できないことが示されつつある。こうした背景から、脳を「時空間的過程の集合体」として捉えるプロセス存在論的アプローチへの関心が高まっている。
本記事では、局在主義的モデルとプロセス存在論的脳モデルの理論的前提・実証エビデンス・研究設計上の特徴を体系的に比較し、両者がどのような課題で競合し、どこに研究の最前線があるかを整理する。
局在主義的モデルとプロセス存在論的モデルの定義
局在主義的モデルとは
局在主義的モデルの核心は、「認知機能は相対的に安定した脳領域・ノード・小規模回路に対応する」という主張にある。顔認知における紡錘状回顔領域(FFA)の仮説はその代表例であり、病変研究やTMSによる介入が局所ノードの因果的役割を支持してきた。
現在の実務的な局在主義は、かつての「一点局在論」よりも洗練されており、「機能選択的な局所優位+限定的な分布表象」という形態をとることが多い。Haxby らが示したように、選択的ピーク領域の外にも機能関連の分布表象が広がっており、厳密な一点局在説はすでに修正されている。それでも「機能は空間的に無差別ではない」という前提は共有されている。
局在主義モデルが最も強みを発揮するのは、刺激カテゴリの識別、顔・言語・物体命名などの課題、そしてTMSや病変研究による因果検証を伴う場面である。fMRIのROIベータ値やdecoding accuracyといった指標が有効で、比較的短いtask runでも安定した結果が得られやすい。
プロセス存在論的脳モデルとは
プロセス存在論的脳モデルは、Northoff(2016)がWhitehead哲学を神経科学に応用した枠組みに端を発する。この立場では、脳は静的な物や属性の集合ではなく、「世界—脳関係(world–brain relationship)」の中で成立する時空間的過程として理解される。
理論の中核概念として、spatiotemporal nestedness(脳過程が世界の大きな時空間スケールに入れ子的に包含されていること)とspatiotemporal directedness(過程が特定の方向性をもつこと)が提唱された。これをさらに発展させた**Temporo-Spatial Theory of Consciousness(TTC)**では、neural predisposition(nestedness)、prerequisite(alignment)、correlate(expansion)、consequence(globalization)という4つの機構が分節されている。
経験科学的には、この理論は次のような測定可能な予測に落とし込まれる。
- ACW(autocorrelation window)/ intrinsic neural timescale:各領域の固有の時間スケール
- PLE(power-law exponent):スケールフリーなダイナミクスの指標
- PAC(phase-amplitude coupling):低周波位相と高周波振幅の結合
- core-periphery topography:内側と外側の神経回路の地形的分離
- rest–task interaction:安静時から課題時への非加法的な相互作用
- spatiotemporal nestedness / alignment:時間・空間構造の入れ子的整合
これらは「局所活動そのもの」ではなく、「局所活動が埋め込まれる時空間的関係構造」が予測の主要因となる、という主張の具体化である。
理論比較マトリクス:何が本質的に違うのか
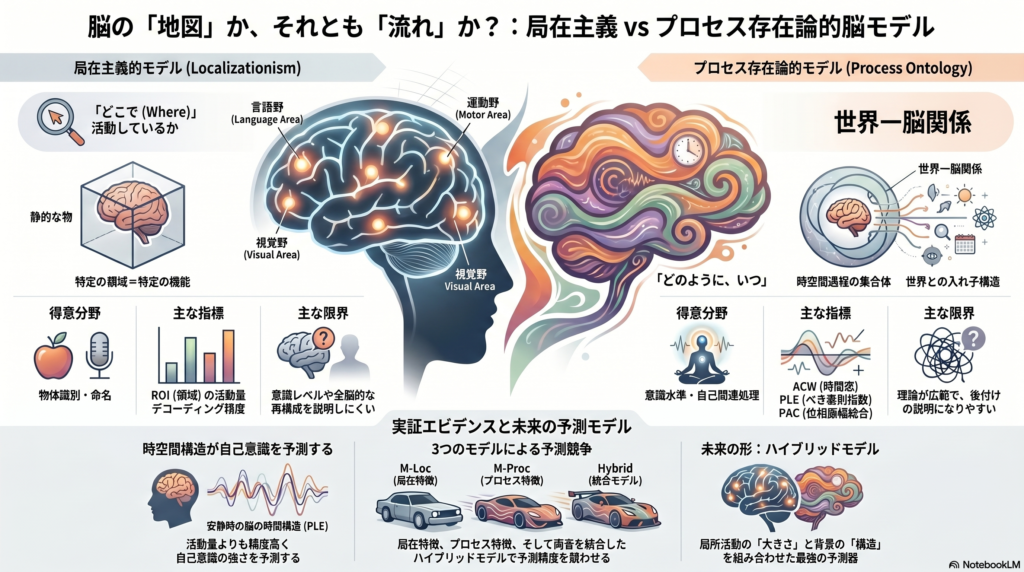
両モデルの違いを一言でまとめると、局在主義は**「機能の座(where)」を問うのに対し、プロセスモデルは「時空間構造の条件(how and when)」**を問う点にある。
| 比較軸 | 局在主義的モデル | プロセス存在論的モデル |
|---|---|---|
| 理論的前提 | 機能は安定した領域・ノードに対応 | 機能は時空間過程に依存し、世界–脳関係が基盤条件 |
| 主なスケール | 空間優位(時間は補助的) | 時間・空間の両方(ミリ秒〜infra-slow) |
| 可観測予測 | ROI beta、decoding accuracy、evoked component | ACW、PLE、PAC、core-periphery、rest–task delta |
| 因果推論 | 病変・TMS・電気刺激と相性が良い | state-dependent TMS、麻酔操作、覚醒水準操作 |
| 最も得意な課題 | 刺激カテゴリ識別、命名、顔認知 | 意識水準、自己関連、rest→task転移、trial変動性 |
| 限界 | 意識レベルや全脳的再編成を説明しにくい | 理論語彙が広く、後付け説明のリスクがある |
この差は実験設計にも直結する。目的変数が「顔か家か」「文法的か否か」であれば局在主義が強い。目的変数が「意識あり vs なし」「自己関連 vs 非自己関連」「rest→task carry-over」であれば、局在主義だけでは説明不足になりやすい。
既存エビデンスの評価:どちらが何を説明できるか
局在主義を支持するエビデンス
1997年のKanwisherらによるFFA発見は今もなお、局所的機能仮説の基礎を成している。BartのFFA周辺損傷による顔構成処理障害の研究、PitcherらのTMS-fMRI研究による動的顔・静的顔経路の分離など、介入研究における局在主義の説明力は依然として強い。
局在主義が最も優れた予測力を示すのは、以下の3条件が揃う場面である。第一に、刺激と反応の対応関係が比較的安定している課題。第二に、局所介入が可能で因果関係の検証がしやすい場面。第三に、カテゴリ分類や命名など、内容の違いを識別する課題である。
プロセスモデルを支持するエビデンス
プロセスモデルにとって特に強力なのは、複数のモダリティにまたがって時空間的構造の階層性が再現されている点である。
- Huangら(2016):内側前頭前野の安静時時間構造(PLE)が自己意識を予測することを示した。意識を局所活動量ではなく時間構造と結びつけた先駆的研究である。
- Huangら(2017):自発活動と誘発活動の相互作用が非加法的かつ位相依存的であることを示した。安静状態が刺激応答の「器」となっている証拠であり、過程モデルの基本主張を支持する。
- Zhangら(2018):麻酔状態ではPLEとSDが全脳的に低下し、両者の空間関係が解離することを示した。意識を全脳的時空間配置として捉える見方への支持材料となっている。
- Golesorkhi ら(2021):MEGを用いた研究で、core領域ではACWが長く、ACW-0がcore/periphery分類をより精度よく予測することを示した。時間階層と空間的core-peripheryの収束が再現されている。
- Cusinatoら(2023):頭蓋内電極記録(iEEG)において、baseline intrinsic timescaleが聴覚応答潜時を説明することを示した。細胞レベルでも過程モデルの具体的予測が支持されている。
- Murrayら(2014):マカクの単一細胞記録で、感覚野から前頭・連合野へintrinsic timescaleが延長することを示した。皮質階層における時間スケールのグラジェントに生理学的基盤を与えた。
これらは「時空間的入れ子構造」が哲学的比喩にとどまらず、細胞レベルから全脳に至るまで連続して測定可能な仮説であることを示している。
両モデルの限界
局在主義の主な限界は3点ある。前刺激状態による同一刺激の知覚変動、安静時と課題時の非加法的相互作用、そして意識状態や精神病理における全脳的時間構造の再編成、これらはROIの平均活動量だけでは予測しにくい。
一方、プロセスモデルの弱点は、理論語彙の広さと後付け説明のリスクにある。また現在の多くの研究は「プロセスモデルの記述」に留まり、強い局在主義的対立仮説とのout-of-sample競合を行っていない。さらに、global signal・覚醒水準・運動・計測施設の違いといった交絡因子によって、全脳的指標が見かけ上有利になる危険も存在する。
競合モデル比較の設計:どう検証すべきか
3つのモデルを同一データで競わせる
最も重要な方法論的要件は、両モデルを同一目的変数に対する競合予測器として定式化することである。評価の基準は説明力ではなく、未見データに対する予測精度でなければならない。
推奨される競合セットは次の3本である。
- M-Loc:ROI / local nodeのみを特徴量とするモデル
- M-Proc:ACW・PLE・PAC・core-periphery・rest-task deltaなどのみを特徴量とするモデル
- M-Hybrid:両者を統合したモデル
目的変数は少なくとも4種に分けるべきである。刺激カテゴリ・自己/他者判断などの内容予測、wake/sedation/anesthesiaなどの状態予測、安静時から課題時へのcarry-overを捉える転移予測、そしてTMSや刺激への状態依存的応答を捉える介入予測である。
モデル選択の手順
モデル比較には、被験者単位のouter splitをもつnested cross-validationを採用すべきである。これにより、時系列依存や被験者固有のベースラインによる情報漏洩を防ぐことができる。具体的には外側5-foldまたはleave-one-subject-out、内側で特徴選択・正則化・ハイパーパラメータ調整を行う。
評価指標は目的変数に応じて使い分ける。分類課題ならAUC・balanced accuracy・log-loss・Brier score、回帰課題ならRMSE・MAE・R²、生成モデル比較ならcross-validated log model evidence・WAIC・Bayes factorが適切である。単一指標への依存は避けるべきで、AUCが高くてもcalibrationが悪ければ実用性は低い。
反証可能性の担保
プロセスモデルが科学的検証に耐えるには、明確な「負け筋」を用意する必要がある。反証条件は少なくとも次の4点である。
- 意識状態や自己関連判断の予測でM-Procがlocc-Locを一貫して上回らない
- M-Procの優位が運動・覚醒・global signal・施設差の統制後に消える
- 異なるモダリティ間でtimescale/PLE関連特徴の対応が再現しない
- state-dependent perturbationが解剖学的ターゲティングを上回らない
逆に局在主義の反証条件は、局所ノードで十分とされる課題でも、前状態やrest–task指標を加えることで外部予測が大きく改善することである。
推奨研究計画:公開データから新規実験へ
短期:公開データでの厳密な競合比較
新規実験よりも公開データの再解析が最優先である。Human Connectome Project(HCP)のfMRI/MEG、Cam-CANのlifespan multimodalデータ、OpenNeuroのCNPなどが有力な候補となる。単一細胞・iEEGレベルではAllen Brain ObservatoryのNeuropixelsデータやDANDIのNWBアーカイブが活用できる。
各モダリティで局在特徴(ROI beta・localizer contrast・sparse DCM)と過程特徴(ACW・PLE・PAC・core-periphery・rest–task modulation)を平行抽出し、同一split上でM-Loc・M-Proc・M-Hybridを学習・評価する。施設差・年齢・性別・頭部運動などはComBatやrandom effectで管理する必要がある。
中長期:新規マルチモーダル実験
中長期では、局在特徴と過程特徴が最も分離して現れる課題を選ぶことが鍵となる。self/other judgment、threshold perception、long-ITI sparse design、state-dependent stimulationが条件を満たす。
推奨設計は健常者約72名を解析対象とし、eyes-open restingと長ITIのsparse self/other taskを組み合わせたものである。TMS-EEGまたはconcurrent TMS-fMRIのサブサンプルを設け、anatomy-triggered TMS(局在主義的アプローチ)とstate-triggered TMS(プロセスモデル的アプローチ)を直接比較することで、両モデルの因果的優劣を検証できる。
まとめ:「局在か過程か」を超えた研究戦略
現時点での最も厳密な結論は、局在主義的モデルは刺激内容の局所的写像として依然有効だが、意識状態・自己関連・rest–task転移・時空間階層を含む予測課題では不十分であり、プロセス存在論的モデルはそれらの領域でより大きな説明可能性をもつ、というものである。
ただし「プロセスモデルが勝った」とは現時点ではまだ言えない。より正確には、「勝ちうる予測課題がかなり明確になってきた」段階にある。今後の最短経路は、公開データでの厳密な競合モデル比較を先行させ、その結果に基づいてstate-dependent perturbationを組み込んだ新規実験を組むことである。
最終的には、「局在か過程か」の二者択一ではなく、ハイブリッドモデルが最良の予測器になる可能性が高い。意識研究・精神病理・自己関連処理といった領域では、局所活動の「大きさ」と背景時空間状態の「構造」を組み合わせることで、より堅牢な予測モデルが構築されるだろう。
コメント