4Eアプローチとは何か?——脳中心主義を超えた認知の新視点
人工知能やロボット研究において、近年「4Eアプローチ」と呼ばれる認知科学の枠組みが注目を集めている。これは認知を「脳の中だけで完結する処理」とは捉えず、身体・環境・行動との不可分な相互作用として理解するパラダイムだ。
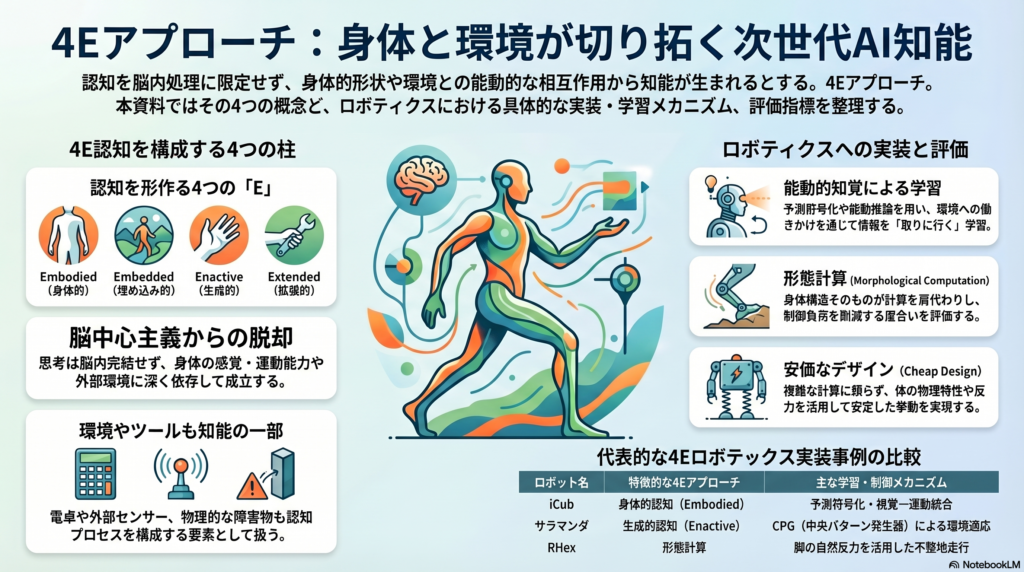
4Eとは以下の4つの概念の頭文字を指す。
- Embodied(身体的認知):認知は身体の形状・感覚・運動能力と切り離せない
- Embedded(埋め込み的認知):認知は物理的・社会的環境に依存する
- Enactive(生成的認知):知覚は能動的な行為によって「生成」される
- Extended(拡張認知):認知プロセスはツールや外部記号系へ拡張しうる
この枠組みはVarelaらの『The Embodied Mind』(1991)やClark & Chalmersの「The Extended Mind」(1998)などを理論的源流としており、現象学者メルロー=ポンティのいう「生きられた身体」の概念とも深くつながっている。
ロボティクスやAI研究の文脈では、この4Eアプローチは単なる哲学的議論にとどまらない。身体を持ち、環境と継続的に相互作用するシステムがいかに効率よく学習・適応できるかという、きわめて実践的な問いに直結しているからだ。本記事では、4E理論の基盤から始まり、ロボット実装事例、学習メカニズム、評価指標、そして今後の研究課題まで体系的に解説する。
4E認知の哲学的基盤——身体と環境が「考える」とはどういうことか
Embodied(身体的認知)の核心
身体的認知の出発点は、「思考は身体なしには成立しない」という主張にある。Varela、Thompson、Rosehらは『The Embodied Mind』のなかで、「身体は生きられた経験構造であると同時に、認知機構の環境でもある」と論じた。つまり、感覚器官からのフィードバックや運動制御のプロセスが認知そのものを形成しているという立場だ。
Gallagher(2012)もまた、センサー・モーター的統合なしには高次思考が成立しないと主張し、近代認知科学が軽視してきた身体の役割を再評価した。これは「脳がすべてを計算する」という古典的な情報処理モデルへの根本的な問い直しでもある。
Embedded・Enactive・Extendedの実践的意味
埋め込み的認知(Embedded)の観点では、Clark(1997)が「財布や電卓が認知を補助する」という身近な例を通じて、環境そのものが認知処理の一部になると論じた。これはロボットが周囲の物理環境をセンサーで継続的に読み取り、それを知能の構成要素として活用するという設計思想に直結する。
生成的認知(Enactive)は、知覚が受動的な「受け取り」ではなく、能動的な「探索」によって構築されるという視点だ。ロボットが手足を動かし、カメラ視点を変え、触感を確かめることで初めて「見えてくる」情報がある、という考え方はロボット制御の新たな設計原理となっている。
拡張認知(Extended)は、身体の外部にあるツールや記号が認知の一部として機能するという概念で、外部センサーや環境内の手がかりを内部信号と等価に扱う知能設計の根拠となる。
ロボティクスにおける身体性実装——6つの代表事例
4E理論をロボット工学に実装する試みは多岐にわたる。ここでは身体形態・センサ構成・学習方式の観点から代表的な6事例を取り上げる。
iCub——ヒト型発達認知研究の旗手
iCubは身長104cmの人型ロボットで、53の自由度(上半身41、手指12)を持つ。エンコーダ・力覚・タッチ・視覚・音声センサを統合し、人間の子どもに相当するサイズで設計されている。模倣学習や強化学習を用いた視覚-運動統合の研究プラットフォームとして広く活用されており、予測符号化を応用した腕の制御実験も行われている。オープンソースで公開されているため研究コミュニティでの利用が広がっているが、複雑な構造ゆえに運用コストが高い面もある。
NAO——教育・社会ロボティクスの標準機
Aldebaran社製の小型ヒト型ロボットNAO(高さ58cm、25自由度)は、IMU・超音波センサ・カメラ・マイク・圧力センサなど多様なセンサを搭載し、歩行学習や対話制御の研究に広く使われている。模倣学習や行動学習の実装例が豊富で、教育現場での活用も進んでいる。処理能力に制約があるものの、その普及度は研究のベースラインとして機能している。
サラマンダロボット——生物模倣CPGと水陸両用移動
サラマンダのように蛇形ボディに4本の脚を持つこのロボットは、中央パターン発生器(CPG)を用いた制御で水中泳ぎと陸上歩行を自動的に切り替える。駆動信号の強弱に応じて運動モードが変化するという生物模倣設計で、「能動的行動が知覚・制御の本質」というEnactive認知の実証的なデモンストレーションとなっている。
ソフト形状変化ロボ(Shah 2020)——環境適応型の自律移動
インフレータブル構造を持つこのロボットは、内部気圧の変化によって形状を変え、平坦面から傾斜面への移動を自律的に最適化する。制御ポリシーと形状を同時に探索するヒルクライミング手法を用い、地形に応じた速度向上を実証している。シミュレーション主体の研究であり、実機への転用や耐久性は今後の課題だ。
自己修復形態ロボ(Kriegman 2019)——損傷後の自律形態最適化
損傷を受けた後に自らの形態を再最適化するこのソフトロボットは、遺伝的アルゴリズムで形態と制御を同時に進化させるアプローチを取る。シミュレーション上での成功が示されており、身体の可変性が知能と切り離せないというEmbodied認知の主張を工学的に体現している。
RHex——シンプル設計による不整地走行の実証
6足型の探索ロボットRHexは、最小限のメカ設計と脚の自然反力(プレフェレックス機構)により、複雑な地形を安定して走破する。組込制御が中心で機械学習を多用しないにもかかわらず、堅牢性が高い。「体の物理特性に仕事をさせる」というBraitenbergの「安価なデザイン(cheap design)」原則を体現した事例だ。
環境との相互作用で「学ぶ」技術——5つの主要メカニズム
自己組織化:外部教師なしの内部適応
自己組織化マップ(SOM)に代表されるこの手法は、入力データに最も近いユニット(BMU)とその近傍を繰り返し更新し、トポロジーを保った特徴マップを形成する。ロボットの感覚領域生成やCPGネットワーク調整に応用され、「環境からの統計的構造を体に刻む」という4E的な学習を実現する。
強化学習:試行錯誤による方策の最適化
マルコフ決定過程に基づく強化学習では、エージェントが試行錯誤を重ねながら報酬を最大化する方策を獲得する。Q学習では以下の更新則が基本となる。Q(s,a)←Q(s,a)+α(r+γa′maxQ(s′,a′)−Q(s,a))
四脚ロボットの歩行安定化など、身体と物理法則を活かした運動学習に特に有効であり、環境との相互作用なしには成立しない点で4Eアプローチと深く親和する。
模倣学習:専門家デモからの行動獲得
Behavior Cloning(BC)は専門家の実演データ {(si,ai)} から方策を直接学習する手法で、報酬関数設計を必要としない。より発展的なDAgger(Dataset Aggregation)は、学習中に生じる分布シフトに対処するため、反復的に専門家にクエリを送ってデータを拡張する。人間の手本動作をロボットに転移する際に有効だ。
予測符号化:誤差最小化による内部モデル更新
脳は世界の「生成モデル」を持ち、予測と感覚の差(予測誤差)を最小化するという考え方が予測符号化の核心だ。Oliver et al.(2019)はiCubロボットで自由エネルギー最小化による腕の視覚-固有値統合制御を実装し、報酬設計ではなく「予測整合性の最大化」が運動制御に有効であることを示した。
能動的知覚・能動推論:情報を「取りに行く」
能動的知覚では、センサの視点や配置を能動的に変えることで得られる情報量を最大化する行動が選択される。FristonらのActive Inferenceの枠組みでは、「予測通りの感覚入力になるように行動を選ぶ」=「期待自由エネルギーを最小化する」という原理で行動と知覚が統一的に扱われる。カメラを動かして物体を立体把握したり、触覚で未知物体を探索する行動がこれに当たる。
4E視点からの評価指標と設計原則
4E認知に基づいたロボット評価には、従来の性能指標を超えた視点が求められる。
形態計算量(Morphological Computation) は、身体構造がどれだけの計算処理をオフロードするかを示す概念だ。脚の自然反力を制御に活用するRHexのように、「体の物理特性が制御負荷を削減している度合い」を情報理論的に評価する研究が進んでいる。
適応性・ロバスト性 は、環境変化や損傷後の自己回復能力として評価される。自己修復ロボやソフト形状変化ロボはこの観点の典型例だ。
センサモータ結合度 は、身体と制御がいかに協働しているかを示す定性的基準であり、「最低限のフィードバックで最大限の挙動を引き出せるか」が問われる。
設計原則としては、「身体と環境に仕事をさせる(cheap design)」「形態と制御の協働を前提にした統合設計」「不要な計算を減らすシンプル化」が4E視点の柱となる。
まとめ——4Eアプローチが示す「次世代AI・ロボット知能」の方向性
4Eアプローチは、脳中心主義への対抗軸として登場したが、今やロボティクスとAI研究における実用的な設計思想へと発展しつつある。身体の形態そのものが情報処理に寄与し、環境との相互作用が学習を促進するという視点は、iCubからソフトロボットまで幅広い実装事例で裏付けられている。
一方、現状の研究には課題も残る。複雑環境での検証不足、標準的な評価基準の欠如、社会的インタラクションへの応用の遅れなどがギャップとして挙げられる。これらを克服するためには、多様な地形・動的環境での実証実験と、形態計算や情報フロー指標を用いた定量評価の整備が求められる。
4E理論が示す「脳-身体-環境の統合システムとしての知能」という視座は、今後のAI・ロボット研究の根本的な問い直しを促す可能性を秘めている。
コメント