構造的カップリングとは何か:相互適応の科学的理解
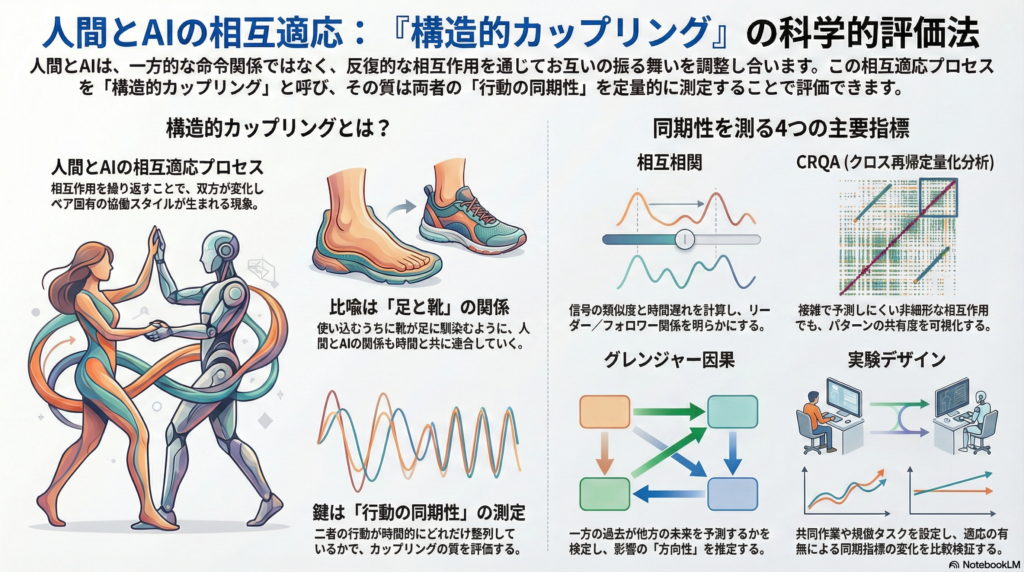
人間とAI、あるいはAI同士が協働する場面では、単なる一方向の命令・実行関係ではなく、双方が相手の振る舞いに応じて行動を調整し合う現象が観察される。この相互適応のプロセスを構造的カップリングと呼ぶ。
構造的カップリングは、生物学者マトゥラーナとヴァレラのオートポイエーシス理論に由来する概念である。彼らは「足と靴」の比喩を用いて、使い込むうちに靴が足に馴染み、相互に変化して適合が高まる様子を説明した。人間とAIの関係も同様に、反復的な相互作用を通じて双方が変化し、ペア固有の協働様式が形成されていく。
この相互適応がうまく進んだときに観測される主要な結果が**行動の同期性(behavioral synchrony)**である。2者の行動や信号が時間的に整列し、協調パターンが生じる程度を示すこの同期性を定量的に測定することで、構造的カップリングの質を評価できる可能性がある。
本記事では、人間–AIインタラクションにおける相互適応を科学的に測定するための指標、実験デザイン、理論的背景、そして実装例を体系的に整理する。
行動同期性の定量指標:何をどう測るか
相互適応の程度を客観的に評価するには、2者の振る舞いがどれだけ同期しているかを数値化する必要がある。これまでの研究で用いられてきた代表的な指標を紹介する。
相関係数と相互相関
最も基本的な指標は、2つの時系列信号の線形関係を測る相関係数である。人間の関節角度とロボットの関節角度の軌跡、あるいは音声の韻律パターンなど、同種の信号を比較する際に有効だ。
さらに**相互相関(cross-correlation)**は、時間遅れを変化させながら類似度を計算することで、位相差や遅延を含めた整列を推定できる。相互相関が最大になる遅れ時間を調べることで、どちらが先行しやすいか(リーダー/フォロワー関係)を明らかにできる。遅れが小さいほど同期が強いと解釈される。
一致率と時間遅れ分析
協働ナビゲーションやダンスのような課題では、2者が一致する行動・イベントを示した割合として一致率を定義できる。進行方向の一致、ステップの同時性など、タスクに応じた具体的な行動カテゴリーで評価する。
また、相互相関のピーク位置から推定される時間遅れは、反応の速さや追従の精度を示す指標となる。ロボットが人の動きに平均200ms遅れて追従しているといった情報は、制御系の改善に直結する。
非線形時系列のためのCRQA
人間の自然な相互作用は非周期的で複雑な場合が多い。こうした非線形時系列の同期を捉えるために、**クロス再帰定量化分析(CRQA)**が用いられる。
CRQAは、2者が類似状態に再訪する頻度(再帰率)や、同期状態が連続する長さ(決定性)を評価する。即興的な会話や共同作業のように、パターンが予測しにくい相互作用でも、状態遷移のパターンがどれだけ共有されるかを可視化できる。再帰プロット上で斜め線の構造が強く現れるほど、継続的な同期が生じていると解釈される。
方向性を捉えるグレンジャー因果
相互適応には非対称性が含まれることがある。片方が主に追従しているのか、双方向に影響し合っているのかを把握するため、**グレンジャー因果(Granger causality)**が有効である。
この手法は、一方の過去が他方の未来を予測するかを統計的に検定し、方向性のある影響を推定する。物体の手渡し動作において、渡し手の力や軌道が受け手のタイミングに影響するかを推定し、人間らしいロボット制御に反映させた研究例もある。
複数指標の併用
実務上は、相関系指標の解釈の容易さ、CRQAによる非線形構造の捕捉、グレンジャー因果による方向性評価など、複数の指標を併記することで同期の多面性を押さえることが推奨される。さらに周波数領域で同期を見るクロス・ウェーブレット解析や、速度変化を許しながら系列類似度を測る**DTW(動的時間伸縮)**なども目的に応じて併用される。
実験デザイン:カップリングを引き出す協働タスク
構造的カップリングを評価するには、相互影響が実際に生じる状況を実験的に作り出す必要がある。代表的なタスクパラダイムを整理する。
共同の身体タスク
物理的な協働作業は、相互適応を観察する最も直接的な場である。共同組立、共同搬送、共操作(co-manipulation)、物体の**手渡し(handover)**などが典型例だ。動作のタイミング、力の整合、軌道の整列などで同期が現れる。
近接協働HRI(ヒューマン–ロボット・インタラクション)では、共有作業空間での手渡しが主要な研究対象となっており、相互相関やCRQAなどの同期指標が用いられている。条件操作として、適応制御あり/なしを比較し、同期指標の差で相互適応の効果を検証する手法が一般的だ。
模倣・追従タスク
ミラーゲームのように互いの動きを合わせる課題、役割交代を含む追従課題などでは、追従精度、遅れ、安定性(同期が維持される期間)を測る。ロボットとのダンス協働では、専門家による主観評価と同期指標を併用する例もある。
こうしたタスクでは、リーダー/フォロワーの役割が明確なため、時間遅れ分析やグレンジャー因果が特に有効となる。
目標指向の協働タスク
共有制御(人とAIが同一操作対象を部分的に制御)、共同探索、ゲーム協力などの課題では、入力競合の減少、戦略の収束、タスク成績の改善が相互適応の結果として測定される。
この種のタスクでは、行動の同期だけでなく、意思決定パターンの類似度や役割分化の安定性も評価対象となる。
対話・コミュニケーションタスク
交渉、情報収集、共同計画などの対話課題では、身体同期(姿勢・ジェスチャー)に加えて、語彙・話速・ターンテイキングの同期も対象となる。
ある研究では、人は非人間アバター相手でも無意識に身体動作を同期させ、協力的文脈で同期が強まり、所属感(affiliation)も高まることが報告されている。対話における整列メカニズムは**エントレインメント(entrainment)**として知られ、統一的なフレームワークが提案されている。
実験条件の設定
効果を明確にするために、ベースライン条件(非適応AI、視覚遮断、同期を促さない条件等)を設け、同期指標がどれだけ上昇するかで検証することが重要である。また負荷(ストレス、課題難度)や協力性(協力/競争)を操作して、同期がどう変化するかを調べる。
動作データだけでなく、主観評価(流暢さ、信頼感、理解されている感覚など)も合わせて測定することで、解釈の安定性が高まる。
理論的背景:オートポイエーシスとエナクティブ認知
構造的カップリングを単なる行動指標の一致として見るのではなく、相互作用そのものが形成する構造の表れとして理解する理論的枠組みが存在する。
オートポイエーシス理論
マトゥラーナとヴァレラのオートポイエーシスは、生命システムが自己組織化を通じて自らを維持する過程を記述する理論である。構造的カップリングはこの文脈で、反復相互作用の歴史が双方の構造変化を導き、ペア固有の結合が形成されるという考え方を提供する。
この観点では、人間とAIの相互作用も単なる情報交換ではなく、継続的フィードバックを通じた相互適応のプロセスとして捉えられる。時間とともに行動様式が共進化し、相互作用パターンが安定化していく。
エナクティブ認知
**エナクティブ認知(enaction)**は、認知が主体と環境の能動的な相互作用(センサリモーターループ)から生起すると考える立場である。知能や意味は内部だけで完結せず、相互作用のなかで立ち上がるとする。
人間–AIの相互作用を「結合した動的システム」として見れば、同期性は単なる表面指標ではなく、相互作用そのものが形成する構造の表れと理解できる。この視点は、AIを一方的に人に合わせる設計だけでなく、双方向の適応を促す設計の重要性を示唆する。
共整列(co-alignment)の概念
近年、AIを一方的に人に合わせる「片方向の整列」だけでなく、共整列(co-alignment)、すなわち人とAIが双方に適応し合う枠組みが提案されている。
2025年の研究では、**双方向の認知整列(BiCA:Bidirectional Cognitive Alignment)**として、人とAIが共同でプロトコルを共進化させることで、静的・片方向の整列よりも性能と安全性が改善する可能性が示唆された。これは構造的カップリングの核心である双方向性を、現代AIの協働設計に翻訳したものと言える。
実装と応用:HRI、マルチエージェント、対話エージェント
構造的カップリングの評価手法は、さまざまな応用領域で実装されている。
ヒューマン–ロボット・インタラクション(HRI)
HRIでは相互適応は**流暢さ(fluency)**やチーミングとして議論される。手渡し研究では、人間同士のデータから相互影響を解析し、ロボット制御に取り込む例がある。
Medinaらは人間同士の手渡しを記録し、グレンジャー因果で相互作用ダイナミクスを推定して、人間らしい流体的ハンドオーバ制御を設計した。治療・ケア領域では、同期と相互性(reciprocity)が信頼・理解の感覚を促進する重要機構として整理されている。
運動協働(エクササイズ、ダンス、共操作)では、位相差の安定性、遅れの減少、同期維持の長さなどが評価される。
マルチエージェント(AI–AI)
AI同士の相互作用では、互いの方策が相手に応じて変化し、協調様式が形成される。協力チームでは方策の類似度収束や役割分化の安定化が相互適応の表れになる。
BiCA研究では、人–AIの共適応の度合いを**方策類似度(クロスエントロピー等)**で測る指標が用いられ、共適応条件で類似度が高まる傾向が報告された。AI–AIでも同様に、プロトコルや戦略の収束、再同期(再適応)時間などが評価対象となる。
対話エージェント
対話では語彙・話速・韻律・ターンテイキングのエントレインメントが重要である。非人間アバター相手でも身体同期が生じ、協力的状況で同期が強まり、所属感も高まったという報告がある。
会話における整列メカニズムを統一的に整理する枠組みとして、アラインメントの機械論的フレームワークが提案されており、対話エージェント設計の理論的基盤となっている。
時系列データ解析:測定の実際
相互適応は時間的現象であるため、評価の基盤は時系列データの適切な取得と解析にある。
データ取得
動作(位置・角度・速度)、音声(ピッチ・エネルギー)、生理(心拍等)、イベントログなどを同期取得する。モーションキャプチャ、力センサー、音声解析、視線追跡などの技術が組み合わされる。
身体同期は自動抽出でも人手評価と高く一致する例が報告されており、大規模データでの評価が可能になっている。
時間窓による解析
実務では、時間窓ごとに同期指標を計算し、相互作用の進行に伴って同期が上昇するか(学習・適応のトレンド)を見る。CRQAの再帰プロットでは、同期の継続が長いほど斜め線が強く現れ、適応が進むと線構造が強まるなどの解釈が可能である。
リアルタイム適応制御
オンラインで同期状態を検出し、同期低下をトリガーにAI側が戦略を変更する「リアルタイム結合維持」も検討されている。Iqbal & Riekは離散イベント列から集団の同期(心理運動的エントレインメント)を自動検出する方法を提案し、CRQAとの比較も行っている。
このようなリアルタイム評価は、適応的なAI制御の基盤として期待される。
まとめ:相互適応を測定可能な科学として確立する
人間–AI、あるいはAI–AIの構造的カップリングを定量評価するには、以下の要素が重要である。
- 同期性指標:相関・相互相関、時間遅れ分析、一致率、CRQA、グレンジャー因果など、多面的な評価
- 協働タスク設計:相互影響が生じる実験条件の設定とベースライン比較
- 理論的基盤:オートポイエーシス、エナクティブ認知、共整列の視点から、同期を相互作用構造の表れとして理解
- 時系列データ解析:適切なセンサー配置と解析手法の選択、リアルタイム評価への展開
これらを統合することで、人間とAIが「同じリズムで踊れる」協働関係を、測定可能な科学として確立できる可能性がある。
今後の展開としては、同期指標の標準化(「カップリング指数」の開発)、複数モダリティの統合評価、リアルタイム同期推定と適応制御の統合などが期待される。相互適応を設計原理として採用することが、性能・安全性の改善につながるという知見も蓄積されつつあり、人間中心のAI設計の新たな方向性を示している。
コメント