なぜ「自由エネルギー原理×因果構造」の物理実装が重要なのか
自由エネルギー原理(Free Energy Principle:FEP)は、知覚・学習・行動を統一的に説明する枠組みとして神経科学・人工知能の両分野で注目を集めている。しかし「理論として面白い」と「物理的に実装できる」の間には大きな溝がある。
特に、単なるベイズ推論を走らせるだけでは「因果構造」の実装として不十分だという点は、まだ広く認識されているとは言いがたい。本記事では、FEPに基づく因果構造の物理実装に必要な要件を、神経生物学・細胞/分子・ソフトウェア・ハードウェアという複数のプラットフォームにわたって整理する。研究者・エンジニアが「何を設計すれば本当に因果を扱えるシステムになるのか」を判断するための地図として活用してほしい。
自由エネルギー原理(FEP)とアクティブインフェレンスの基本構造
変分自由エネルギーの最小化とは何か
FEPの核心は、自己組織化する系が「サプライズ(観測の負対数確率)」の長期平均を抑えるために、その上界である変分自由エネルギーを最小化するように振る舞うという主張である。数式的には、生成モデル p(o,s∣m) と変分近似 q(s) を用いて次のように表現される。 F[q]=Eq(s)[lnq(s)−lnp(o,s∣m)]=DKL(q(s)∥p(s∣m))−Eq(s)[lnp(o∣s,m)]
この式は「複雑さ(事後と事前の乖離)」と「正確さ(尤度)」のトレードオフとして解釈でき、自由エネルギー最小化はモデルエビデンスの最大化に対応する(近似の範囲で)。
アクティブインフェレンスが「行為」を統合する
アクティブインフェレンスは自由エネルギー最小化を知覚に留めず、行為選択へ拡張する枠組みである。将来の観測に関する信念の下で期待自由エネルギー(Expected Free Energy:EFE)を最小化する方策を選ぶことで、探索(情報利得)と好み(目標状態)が同一の原理から導かれる点が特徴的だ。
実装上は離散状態・離散時間のPOMDP表現が標準的に用いられ、状態推定・方策推定・精度パラメータ更新を含む具体的な更新式が体系化されている。
因果構造とは何か——統計的依存関係との違い
操作的介入(do演算子)が因果を定義する
FEPの文脈で「因果構造」を扱うにあたり、まず統計的依存関係(相関・条件付き独立)との区別を明確にする必要がある。構造因果モデル(SCM)では、各変数 Xi が親集合 pai と外生ノイズ Ui により Xi=fi(pai,Ui) として与えられ、介入 do(Xi=x) は「元の方程式を切除して固定値に置換する」操作として定義される。
観測分布だけでは因果方向を一意に同定できない。介入(実験・行為)があってはじめて識別が可能になる——これが因果推論の根本原理であり、FEPにおける「行為」が単なる制御ではなく「最適実験計画」と同型である理由でもある。
FEPにおける「因果」の二層構造
FEP・アクティブインフェレンスにおける因果性は少なくとも二層で区別する必要がある。第一に、環境(生成過程)には実在の因果機構が存在する。第二に、エージェントが保持する生成モデルは、それを近似した「因果仮説」である。予測符号化の古典的定式化においても「脳が階層的力学系として世界の因果構造を符号化する」という言い方が明示されており、生成モデルの階層・力学が因果仮説の中核を成す。
ただし、ベイズネットの因子分解は「生成の向き」を与えるが、それが介入に対して正しい意味で因果的であるためには、do演算子の「切断」に相当する操作がモデルと物理機構に一貫して実装されなければならない。
物理実装に必要な7つの要件
実装要件は「抽象レベル(数学・計算)」と「物理レベル(神経・細胞・ソフト・ハード)」の対応関係として記述するのが、検証可能性の観点で最も有効である。以下に7つの核心的要件を整理する。
要件1:Markov Blanket による境界条件の設計
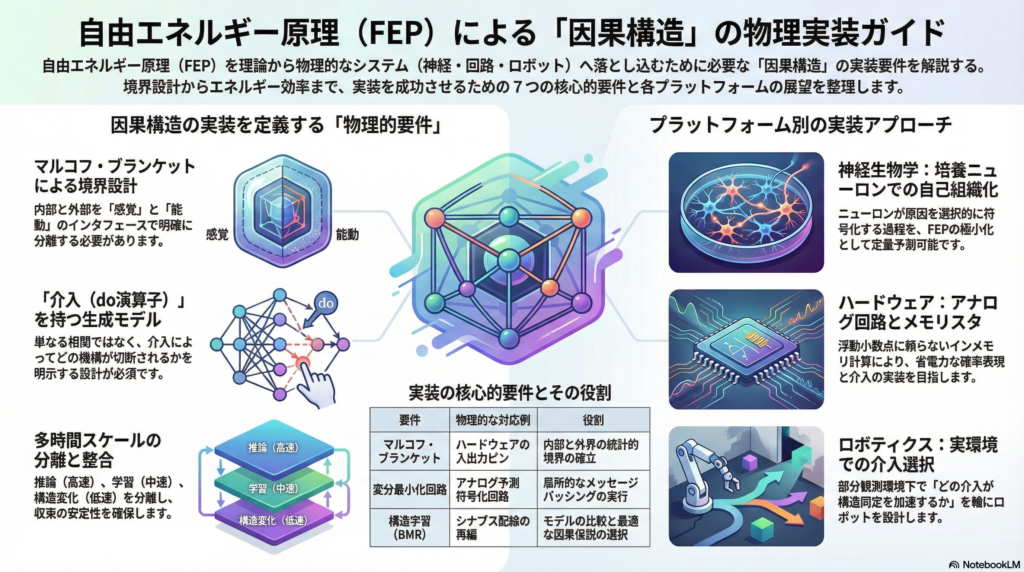
外界と内部を隔てる統計的境界——Markov blanket——に対応する「感覚(観測)インタフェース」と「行為(介入)インタフェース」の明確な分離が必要になる。内部状態と外部状態が直接結合せず、感覚状態と能動状態を介した条件付き独立が成立することが、FEPが要請する境界条件である。
神経生物学では膜電位とシナプス結合が、ハードウェアでは入出力ピンの設計がこれに対応する可能性がある。Markov blanketは階層的に入れ子になり得るため(細胞→個体→環境)、モジュール設計のインタフェース仕様としても機能する。
要件2:因果表現——グラフ構造として「介入」を持つ生成モデル
因果仮説を「有向依存・遷移・介入効果」として保持する生成モデルが必要だ。因子グラフ(Forney factor graph)として生成モデルを表現し、その上でメッセージパッシングとして信念更新を記述し、神経回路や電子回路へ写像するというアプローチが有力である。
ここで重要なのは、単なる確率グラフ(ベイズネット)では不十分という点だ。介入によってどの機構が「切断」されるかを明示する操作的定義が、因果実装の必要条件となる。
要件3:変分自由エネルギー最小化の局所回路実装
変分自由エネルギーの最小化に等価な局所更新——メッセージパッシングや勾配流——を実行できる計算機構が求められる。予測符号化ネットワークを古典アナログ回路として設計し、回路シミュレータで性能評価した研究では、ソフトウェア実装と同等の変分推論ダイナミクスを回路で再現できることが示唆されている。
評価指標としては収束速度・計算量・安定性(発散・振動)が中心となる。
要件4:行為=介入として機能する方策選択機構
期待自由エネルギー最小化による方策選択が「どの介入を打てば候補因果構造が最も区別できるか」という最適実験計画として機能することが、因果構造の物理実装における重要な設計原理である。
観測だけでは同定困難な因果方向・隠れ交絡を、介入データで識別していく一般原理と整合的であり、ロボット実装では「道具操作」「部分観測下の分岐タスク」などが検証環境の候補になり得る。
要件5:構造学習——モデル比較と縮約の機構
モデルエビデンスの近似(変分自由エネルギー差)によるモデル比較、および候補因果構造の縮約・拡張を行う機構が必要である。Bayesian Model Reduction(BMR)のような縮約手法はモデル空間探索を大幅に軽量化するが、「どのような候補生成と縮約操作が生物・回路・ロボットそれぞれで妥当か」は現時点では未確立の部分が多い。
構造学習は推論よりも桁違いに重い計算・物理コストを持つため、実装戦略としては(i)候補構造の制約と強い事前分布、(ii)縮約による高速スコアリング、(iii)介入の情報利得最大化を組み合わせるアプローチが合理的とみられる。
要件6:多時間スケールの分離設計
高速の推論・制御(ミリ秒〜秒)、中速のパラメータ学習(秒〜時間)、低速の構造変化・配線変化(時間〜日)を分離しつつ整合させる設計が必要だ。生物神経系では遅延変調可塑性が方策評価に対応する可能性があり、ハードウェアではクロック・配線遅延が推論スケジュールを規定する。
この多時間スケール設計の失敗は、収束の不安定化や構造学習の崩壊に直結するため、実装上の主要なリスクファクターの一つとして認識すべきである。
要件7:エネルギー効率とノイズ耐性の同時確保
熱力学・エネルギー散逸・デバイス変動・ノイズ下で安定動作することが、物理実装の必要条件である。評価指標としては「因果推論精度」だけでなく、「エネルギー/推論(J/inference)」「ノイズ耐性(OOD検出性能)」「スケーラビリティ」を同時に定量化する枠組みが求められる。
メモリスタクロスバーを用いたベイズニューラルネットの実装研究では、確率表現をデバイス物理と整合させるために「技術的損失」を追加する手法が用いられており、FEP系実装でも分布表現とデバイス制約の共同設計が必須になると予想される。
実装プラットフォーム別の課題比較
神経生物学的実装:培養ニューロン実験からの知見
培養皮質ニューロンが「複数潜在源の混合」課題において自己組織化し、原因を選択的に符号化するよう可塑的変化を示す、という研究は注目に値する。この過程が変分自由エネルギーの極小化として定量予測できることが報告されており、因果構造学習の生体基質への拡張(可塑性・閾値・結合再編)に踏み込む実験的ロードマップの起点になり得る。
ただし、「统計的グラフ」と「因果的グラフ」の対応——介入がどの機構の「切断」に相当するか——を神経系で定義することは、依然として困難な問題として残っている。
ハードウェア実装:アナログ回路とメモリスタの可能性
アナログ回路での予測符号化ネットワーク実装研究は、自由エネルギー最小化ダイナミクスを電子回路へ写像できることを示唆する。一方、メモリスタクロスバー上でのベイズニューラルネット実装は「確率表現は浮動小数点計算に限らない」ことを示しており、インメモリ計算による省電力化の可能性を開く。
因果構造の回路実装としては、「自由エネルギー降下回路」に「確率表現(分布重み)」と「介入切替(入力・結合切断)」を加える設計が現実的なルートとして考えられる。
ロボット・実環境での検証
深層アクティブインフェレンスを物理ロボットへ適用し、好み精度(探索/活用バランス)を操作して挙動を評価する研究が報告されている。因果構造学習を組み込む場合は、「因果方向が曖昧なセンサ—行為—結果のループ」を持つ部分観測環境で、介入選択が構造同定を加速するかを測る設計が有効だろう。
理論の限界と未解決問題
FEPを因果構造実装へ適用する際の重要な留意点として、以下を挙げておく必要がある。
Markov blanket条件やソレノイダル流の制約、平均のダイナミクスとダイナミクスの平均の同一視など、理論導出の中心ステップが狭い仮定に依存し得るという批判的検討がある。「FEPは一般原理というよりモデリング枠組みではないか」という問いも依然として議論されており、実装要件を語るには「具体的生成モデル+具体的近似+具体的物理基質」へ落とし込んだときの可検証な予測として定義し直すことが不可欠である。
また、期待自由エネルギーの探索項がどの汎関数から必然的に導かれるかについては議論があり、探索/活用バランスの設計原理が揺れ得る点にも注意が必要だ。
まとめ:FEPによる因果構造実装の本質と今後の展望
本記事で整理した内容のポイントを振り返ろう。
FEPに基づく因果構造の物理実装は、ベイズ推論を動かすだけでは不十分であり、(1)Markov blanketによる境界設計、(2)介入操作に対応する因果表現、(3)変分自由エネルギー最小化の局所回路、(4)方策選択を介入デザインとして機能させること、(5)モデル比較による構造学習、(6)多時間スケールの分離設計、(7)エネルギー効率とノイズ耐性の同時確保——という7つの要件を体系的に満たすことが求められる。
実装の本質的な難しさは「構造学習」にあり、推論よりも桁違いに重い計算・物理コストをどう抑えるかが、神経・回路・ロボットいずれのプラットフォームでも中心的課題となる。
コメント