なぜいま「因果スキルライブラリ×メタ学習」が注目されるのか
機械学習の研究において、「学んだ知識を別の場面でも使い回せるか」という問いは長年の課題だった。従来のディープラーニングモデルは大量のデータと計算資源を必要とし、新しいタスクが現れるたびにゼロから学習し直す必要があった。これは人間の学習スタイルとは大きく異なる。人間は過去の経験から「法則」や「コツ」を抽出し、初めて見る状況にも少ない試行で対応できる。
この「人間らしい汎化能力」をAIで実現しようとする試みが、**メタ学習(meta-learning)と因果推論(causal inference)**の融合研究である。特に近年注目されているのが、**因果スキルライブラリ(causal skill library)**という概念だ。これは単なるスキルの蓄積ではなく、因果構造・メカニズム・不変性・不確実性を組み合わせた「再利用可能な知識体系」として位置づけられる。
本記事では、因果スキルライブラリの定義・構成要素・学習方法・評価手法・将来課題を体系的に解説する。AIの汎化能力に関心のある研究者・エンジニアにとって、この領域の現状と可能性を把握するための一助となれば幸いである。
因果スキルライブラリの定義と構成要素
因果スキルライブラリとは何か
因果スキルライブラリとは、構造的因果モデル(SCM: Structural Causal Model)に基づく因果知識と、その知識を使って意思決定・制御を行う「スキル」を、検索(retrieval)→再結合(composition)→高速適応(fast adaptation)できる形で蓄積する体系として定義される。
SCMとは、各変数が「親(原因)変数」と外生ノイズの関数として生成される構造方程式の集合であり、対応する**有向非巡回グラフ(DAG)**が因果グラフとして解釈される。介入(intervention)は、ある変数の生成メカニズムを書き換える操作として形式化され、do演算子による介入分布は「その変数をランダム化した実験下での分布」として解釈される。
因果知識の再利用を正当化する鍵として重要なのが、**独立因果メカニズム(ICM: Independent Causal Mechanisms)**の考え方だ。分布が変化する場合でも、「どのメカニズムが変わるか」は局所的・疎であり、他のメカニズムは不変であるという直観が、転移・頑健化・モジュール化を支える。
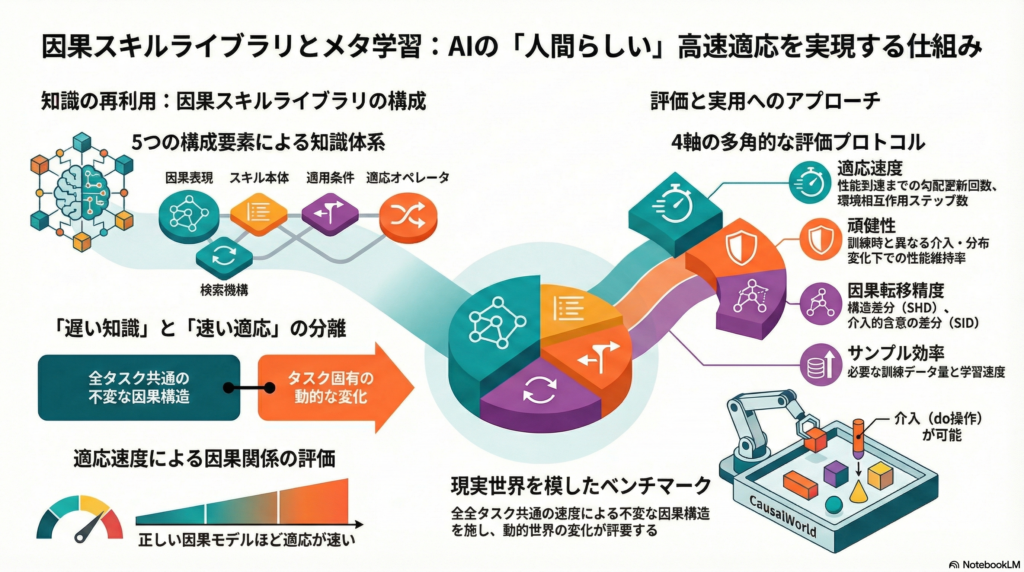
因果スキルライブラリの5つの構成要素
因果スキルライブラリは、以下の5要素から構成される。
① 因果表現(Causal Representation)
因果グラフ断片、構造方程式(メカニズム)モジュール、因果プログラム(介入可能な生成規則)などが含まれる。これは「何が何を引き起こすか」を表現する知識の核心部分だ。
② スキル本体(Skill Core)
制御・推論・介入設計を担う方策や推論器が該当する。強化学習における「オプション(option)」、RNNエージェント、タスク固有の最適化器などが具体例として挙げられる。
③ 適用条件(Precondition / Applicability)
どのコンテキスト・介入・分布でそのスキルが有効かを因果的に特徴づけるメタデータである。因果的に関連する変数集合、介入軸、成立確率などが含まれる。ロボット操作における技能学習の研究(SCALE)では、技能ごとに前提条件分類器を持つ設計がこの具体例として参照されている。
④ 検索・選択機構(Retrieval / Selection)
新タスクの少数データから、適切な技能・因果モジュールを選ぶ機構である。距離学習・プロトタイプ、タスク埋め込み、ベイズ事後確率などが活用される。
⑤ 高速適応オペレータ(Fast Adaptation Operator)
選ばれた技能を新タスクに合わせて更新する規則だ。MAML型の少数勾配ステップ、解析的適応、ベイズ更新などが代表的なアプローチとなる。
メタ学習との接続:「遅い知識」と「速い適応」の分離
メタ学習の基本的な考え方
メタ学習とは、複数のタスクから「タスクの学び方を学ぶ」アプローチである。「少数のデータで素早く新タスクに適応できる初期化や学習則」を獲得することを目指す。代表的な手法として**MAML(Model-Agnostic Meta-Learning)**が挙げられ、少数勾配ステップで新タスクに適応しやすいモデルパラメータの初期化を学ぶ設計が特徴的だ。
因果スキルライブラリにおけるメタ学習の役割
因果スキルライブラリにおいては、メタ学習は「適応オペレータ」と「検索インデックス」の両方を担う。ここでの核心的な発想は、**「タスク間で共有される”遅い”因果構造・メカニズム」と「タスク固有の”速い”適応(少数データ・介入差分)」**を分離して学ぶという考え方だ。
未知介入下の因果学習を「タスク=介入により生成されたデータセット」とみなし、タスク間で共有される因果構造(遅い変数)と、タスク固有の介入対象(速い変数)を分けて推論する研究も現れている。連続最適化でDAG構造を表すパラメータ(遅いメタパラメータ)と、介入適応を担うパラメータ(速いパラメータ)を分離する設計が、未知介入下の因果メタ学習の中核となっている。
さらに注目すべき発想が、**「適応速度を因果メカニズムの妥当性評価として使う」**という考え方だ。「正しい因果分解ほど適応が速い」というメタ目的を設定することで、ライブラリ内の「良い分割(スキル境界・メカニズム境界)」を、速度という外部可観測な指標で学べる可能性が示されている。
メタ学習アルゴリズムの系統と特徴
勾配ベースのアプローチとしては、MAMLのほか、一次近似のReptile、更新則自体を学ぶMeta-SGDなどがある。距離学習系は、タスク埋め込みやプロトタイプにより検索の高速化が期待でき、ベイズ系はPLATIPUSのようにMAMLを確率化した枠組みで不確実性の保持に強みを持つ。モジュール合成型のアプローチでは、パラメータ適応よりも「構造の再結合」を重視し、ニューラルモジュールの組み合わせで新タスクへの一般化を実現する。
因果転移と不変性:なぜ「分布が変わっても使える知識」が重要か
転移可能性(Transportability)の理論
因果推論には、「移送可能性(transportability)」という重要な概念がある。因果グラフを用いて「どのメカニズムが環境間で共通か」を明示し、介入結果と観測統計を組み合わせることでターゲット環境の因果量を同定する理論だ。この枠組みは、因果スキルライブラリで「どのスキルを再利用すべきか」を選別する指針になる。
機械学習側では、複数環境における**不変条件(条件付き分布の不変性)**を利用してドメイン一般化を最適化する因果転移モデルが提案されている。ただし、不変性ベースの頑健化(IRM等)は実用形での限界も報告されており、「不変性を仮定するだけでなく、介入・メカニズムシフト下の挙動を直接測る」設計が因果スキルライブラリ評価では重要とされる。
メタRLによる因果推論の自動獲得
メタ強化学習(meta-RL)の観点からは、明示的に因果アルゴリズムを埋め込まなくても、介入・観測・反事実を含むエピソードを学習分布として与えることで、エージェントが介入選択や反事実推論を行う”手続き”を獲得しうることが研究で示されている。また、介入を能動的に選んで因果構造を推定するメタRL手法も提案されており、介入方略そのものをタスク分布上で学ぶという方向性が生まれている。
評価プロトコルとベンチマーク
4軸の評価フレームワーク
因果スキルライブラリの評価は、通常のメタ学習評価(少数データで速く良くなるか)に加えて、「介入や分布変化の下でどの知識が再利用でき、どこが変わるべきか」を測る必要がある。評価軸は以下の4つに分解される。
新タスク適応速度として、所定性能到達までの勾配更新回数、環境相互作用ステップ数、壁時計時間を測定する。MAMLは「少数勾配ステップで良い性能」を直接最適化する設計のため、この軸の代表基準となる。
サンプル効率については、学習曲線のAUC、閾値到達サンプル数、少数ショット条件での期待性能を評価する。
**頑健性(分布変化・介入・外部干渉)**では、訓練分布と異なる介入条件や環境パラメータでの性能低下、介入後の回復速度を測定する。
因果転移の定量指標として、構造回復の精度(SHD:構造差分、SID:介入的含意の差分)、介入ロバストネススコア、介入ターゲット推定精度・不確実性較正が含まれる。
主要ベンチマークの特徴
CausalWorldは、ロボット操作を対象とし、多数の環境変数(質量・摩擦・色・サイズ等)にdo介入が可能で、訓練・評価分布を介入軸で系統的に設計できる環境だ。介入可能な変数を明示し、因果スキルライブラリの「適用条件付きスキル」の検証に適している。「現状の手法には極めて難しい」とされるほど高難度の設定も含まれており、研究の基準として価値が高い。
合成SCM生成プロトコルでは、真のDAGと方程式が既知であるため、因果転移の正確性(SHD/SID等)と適応速度を同時に検証できる。介入をhard(方程式を定数に置換)とsoft(方程式を変更)で実装し、疎な変化条件を作ることで速度メタ目的の検証が可能になる。
Bayesian Network Repository系(Asia/Alarm/Child等)は、因果発見の評価に向いており、グラフ回復(SHD/SID)と未知介入推定の検証に活用される。視覚・表現学習向けのCausalTriplet / CausalVerse等の近年のベンチマークは、高次元観測から因果表現を経て下流適応(検索・再利用)を評価するのに適している。
実装・実験設計の概要
提案アルゴリズム(CSL-ML)の概念
因果スキルライブラリのメタ学習アルゴリズム(CSL-ML)は、MAML型の少数ステップ適応、未知介入下の「速い/遅いパラメータ分離」、技能の因果的登録・検索の3要素を統合した設計として提案されている。
メタ訓練フェーズでは、各タスクをサポートセットとクエリセットに分け、タスク埋め込みに基づくライブラリ検索、高速適応(勾配ベース・ベイズ更新・解析的解)、因果・予測統合評価、ライブラリへの因果メタデータ付き登録を順に実行する。メタテストフェーズでは、新タスクの少数サポートから検索→適応→クエリ評価を行う。このループは「学習→蓄積→検索→適用→評価→更新」を明示しており、介入軸を持つ環境(CausalWorldなど)では各ステップを系統的に設計できる。
評価の統計的妥当性
再現性を確保するため、各条件につき十分数のタスクをサンプルし(例:100〜1000タスク)、乱数シードを変えた複数反復(例:10〜30回)で平均・分散・信頼区間を報告することが推奨される。交絡(内生性)の可能性がある設定では、単純な多タスク学習が因果同定に失敗しうることが指摘されているため、識別可能な情報集合を伴う比較条件を必ず含めることが重要だ。
研究上の課題と将来展望
理論的ギャップ:同定・不変性・不確実性
観測データだけでは因果グラフがMarkov同値類までしか識別できないことは、未知介入・少数データ設定での不確実性と直結する。ライブラリ化では「単一の確定グラフ」を保存するより、「構造の事後分布」や「介入ターゲットの不確実性」を保持して下流判断に渡す方向が自然だと考えられる。
また、交絡・内生性の下での因果同定は、単にタスク数を増やしても(転移で平均化しても)解けない場合があることが示されており、ライブラリの中に「識別を成立させる情報設計(介入設計・マスキング設計)」まで技能として組み込む必要がある可能性がある。
スケーラビリティと高次元観測の課題
ロボット操作のような高次元・長ホライゾン領域では、単純なモデルフリー学習だけでは到達が難しいとされる。実用化には、介入で「因果的に関連する変数」を絞る、モジュール再結合で探索空間を圧縮する、解析的適応や不確実性推論で試行錯誤を減らす、という複合戦略が必要になると見られる。
さらに、因果推論研究が「因果変数が与えられている」前提を置きがちであること自体が指摘されており、視覚・言語など高次元観測から因果変数を同定し、介入・反事実生成、下流適応までを一体で扱う因果表現学習が大きな未解決問題として位置づけられている。
実世界応用に向けた倫理・コスト上の課題
医療・ロボティクス・政策評価への応用においては、外部妥当性(他集団への一般化)と介入可能性(倫理・コスト)を両立する必要がある。「どのメカニズムが共通で、どれが変化しうるか」を構造的に表現し、不確実性を保ったまま意思決定に接続する実装が求められる。
まとめ:因果スキルライブラリが拓く汎化するAIの可能性
因果スキルライブラリとメタ学習の融合は、「一度学んだ因果知識を再利用し、少数データで新タスクに高速適応する」という、人間の認知に近い学習システムの実現を目指している。その核心は、ICMに基づくモジュール化、適応速度を用いた因果妥当性評価、因果表現と検索・適応の分離設計にある。
評価面では、構造回復の精度(SHD/SID)・介入ロバストネス・適応速度・サンプル効率を組み合わせた多軸プロトコルが必要であり、CausalWorldのような介入可能ベンチマークと合成SCM環境の組み合わせが現実的な選択肢となる。
一方で、高次元観測からの因果変数同定、未知介入下での不確実性処理、交絡下での同定理論など、理論・実装・評価の各層に未解決の課題が残る。この領域は因果推論・メタ学習・強化学習・ロボティクスが交差する学際的フロンティアであり、今後も急速な進展が期待される。
コメント