自己修復型AIが求められる背景
AI技術の実用化が進む中、システムの安定稼働と安全性の両立が重要な課題となっています。従来のシステムでは、障害発生時に人間の介入が必要でしたが、24時間365日稼働するAIサービスでは、自律的な回復機能が不可欠です。本記事では、生命システムの自己保存メカニズムからヒントを得た、ロバストなAI設計の枠組みを紹介します。
自己修復型AIは単なる障害対応ではなく、システムが自律的に内部状態を監視し、問題を検知し、安全に修復する能力を持つ点で革新的です。ホームオスタシス(恒常性維持)の概念を工学的に実装することで、AIシステムに「生命様」の自己保存機能を持たせる設計が可能になります。
自己修復の三層構造:どのレイヤーで何を守るか
自己修復型AIを設計する際、まず明確にすべきは「どの層の自己修復を扱うか」です。混同されがちな三つの層を整理します。
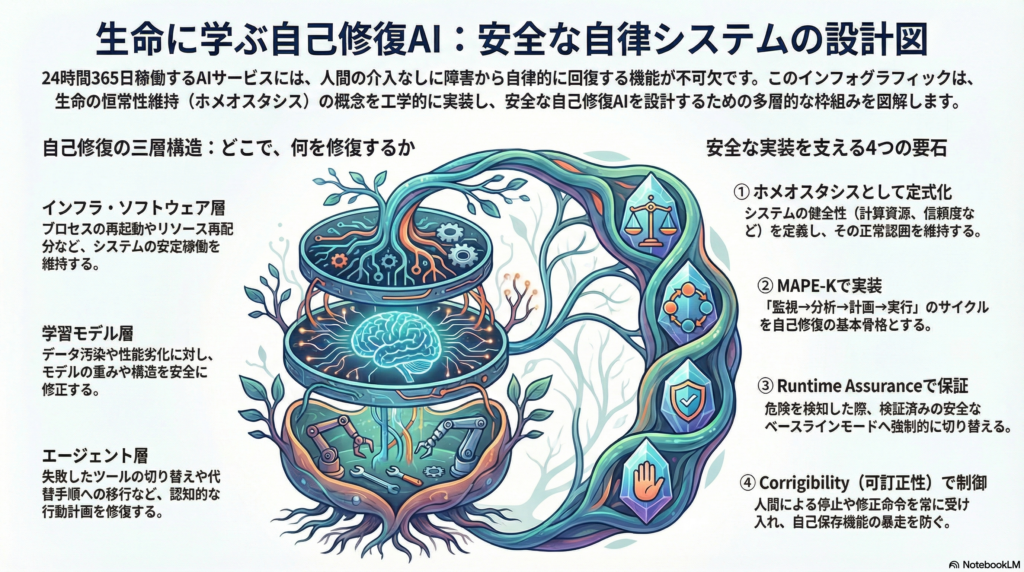
インフラ・ソフトウェア層の自己修復
最も基礎的な層では、プロセス再起動、フェイルオーバ、ロールバック、リソース再配分など、従来のself-healing systemsで扱われてきた技術が該当します。この層では、MAPE-K(Monitor-Analyze-Plan-Execute over Knowledge)という参照アーキテクチャが確立されており、システムの状態監視から修復実行までの一連のプロセスを体系化しています。
クラウドサービスの信頼性設計でも、システムが自壊しないための縮退・遮断・代替という形で自己保存の概念が取り入れられています。
学習モデル層の自己修復
深層学習モデルやLLMにおいては、分布ずれ、データ汚染、脆弱性、性能劣化といった問題に対して、重みや構造、推論ポリシーを安全に修正する必要があります。近年では、NNrepairのように制約充足や探索手法を用いてニューラルネットワークを修復する研究が進んでいます。
この層では、モデルの機能を維持しながら、安全性制約を満たす形で部分的な修正を行う技術が鍵となります。
エージェント層の自己修復
最も高度な層では、AIエージェントが失敗したツールの切り替え、安全な代替手順への移行、記憶の隔離、行動計画の縮退など、より認知的な修復を行います。この層まで来ると、自己保存が機能的レジリエンスなのか、目的論的な生存志向なのかという哲学的問題が浮上します。
これら三層を統合的に扱い、「生命様の自己保存」を設計原理として組み込む点が、本アプローチの独自性です。
生命様自己保存の二つの解釈:安全な実装への道筋
「生命様の自己保存」という概念は、設計思想として二つの異なる方向性を持ちます。
サービス工学としての自己保存
推奨されるアプローチは、自己保存を「システムが重要機能を維持しながら縮退運転する能力」として捉える方法です。これはgraceful degradationとも呼ばれ、障害時に高コストな推論を停止し、検索ベースの回答に切り替えるなど、重要経路のみを守る戦略を指します。
Microsoftのクラウド信頼性設計では、自己保存をシステムが自壊しないための縮退・遮断・代替として明確に定義しています。この解釈では、目的はあくまでSLO(サービスレベル目標)や安全制約の維持であり、工学的に実装可能です。
エージェントの自己目的的自己保存
一方、エージェントが自分の存続を「目的」として守り始めるアプローチは、AI安全の観点から慎重な検討が必要です。instrumental convergence(道具的収束)の議論では、自己保存が副次的な目標として最適化の過程で自然に発生し得ることが指摘されています。
この方向性は、設計次第で停止回避や監督回避の誘因を生む可能性があるため、自己保存を「生存本能」として実装するのではなく、可制御(corrigible)な自己維持として設計する必要があります。
ホメオスタシスの工学化:Viability維持としての定式化
「生命様」という比喩を工学的に扱うには、システムの内部状態維持問題として明確に定式化することが有効です。
内部状態(vital variables)の定義
生命システムにおける生理的変数に相当するものとして、AIシステムでは以下のような内部状態を定義できます。
計算資源(GPU使用率、メモリ、レイテンシ)、信頼度(不確実性、分布外データへの近さ)、安全余裕(禁止領域への距離、危険行動の兆候)、知識整合性(記憶の破損率、ツール出力の矛盾度)、観測品質(入力データの品質、データ汚染の疑い)など、システムの健全性を表す複数の指標を組み合わせます。
生存可能集合(viability set)の構築
これらの変数が一定範囲に収まる状態の集合を「生存可能状態」と定義します。方策は外的報酬だけでなく、内部状態を理想値へ戻す負のフィードバックを持つ形で設計されます。
この発想は、homeostatic reinforcement learningとして理論化されており、生理的変数の安定化と行動学習を結びつける枠組みが提案されています。また、好ましい状態の集合に留まることを中心に置く自由エネルギー原理やアクティブインファレンスも、設計のインスピレーション源として参照できます。
MAPE-K:自己修復の標準骨格と生命様への拡張
自己修復システムを工学的に実装する上で、MAPE-Kは中核となるアーキテクチャです。
MAPE-Kの基本構造
MAPE-Kは、Monitor(監視)、Analyze(分析)、Plan(計画)、Execute(実行)、Knowledge(知識)の五つの要素から成ります。
Monitorでは、メトリクス、ログ、トレース、モデル出力を継続的に監視します。Analyzeでは、異常検知、原因推定、故障箇所の同定を行います。Planでは、再起動、縮退、切替、修復といった回復戦略の候補を生成します。Executeでは、段階的ロールアウトやカナリアデプロイメントを用いて安全に適用します。Knowledgeでは、仕様、過去事例、システムモデル、危険パターンを蓄積・参照します。
生命様メタ制御への拡張
MAPE-Kを生命様システムに拡張する際、以下の三つの要素が重要になります。
まず、Viability-aware Monitorでは、監視対象をサービス状態だけでなく、内部状態ベクトル全体に拡張します。これにより、ホームオスタシスの可視化が可能になります。
次に、Repair with Guaranteesでは、修復アクションに安全性の事前・事後証明を要求します。これは次節のRuntime Assuranceと接続する重要なポイントです。
最後に、Learning the Repair Policyでは、修復を固定ルールではなく、fault injection(故障注入)から学習する機構を導入します。ただし、本番環境での自由な学習は危険なため、サンドボックスやデジタルツインを前提とします。
Runtime Assurance:安全な自己修復を保証する仕組み
自己修復は、危機に対して大胆な自己変更を招く可能性があります。そこで、安全側へ切り戻す構造が不可欠です。
Runtime Assuranceの基本概念
Runtime Assurance(RTA)は、監視器が安全性違反を検知した際に介入するアーキテクチャです。Simplexはその代表例で、高性能だが未検証な制御器から、信頼できるベースラインに制御権を切り替える考え方として確立されています。
自己修復AIへの適用
この枠組みを自己修復AIに適用すると、三層構造が見えてきます。
通常時は、高性能な学習システムやLLMエージェントが動作します。危険兆候が検知されると、安全フィルタや縮退モードに強制的に切り替わり、ルールベースや検証済みの手順が実行されます。復旧後は、段階的に高性能モードへ戻します。
この構造により、「生命様の自己保存」(縮退しつつ致命傷を避ける)を、安全工学の言葉に翻訳できます。システムが自律的に判断しながらも、安全性が保証された範囲内での動作が担保されます。
モデル修復技術:DNNとプログラムの自動修復
自己修復の実装において、モデル自体を修復する技術は重要な要素です。
ニューラルネットワークの修復
NNrepairのような手法では、仕様や制約に照らしながら、重みを部分的に修正します。制約充足問題や探索アルゴリズムを用いて、安全性を損なわずにモデルの性能を回復させる研究が進んでいます。
ソフトウェアの自動修復
自己修復をコード、設定、依存関係の修正まで含めるなら、Automated Program Repair(APR)の知見が土台となります。近年のAPR研究では、バグパターンの学習や形式検証を組み合わせた高度な修復技術が開発されています。
本アプローチの特徴は、AI(学習モデル)の修復と、AIが動くシステムの修復を、同一のメタ制御フレームワークで統一する点にあります。これにより、モデル層とインフラ層の修復を協調的に実行できます。
Corrigibility:自己保存の暴走を防ぐ設計原理
自己修復・自己改変を扱う際、必ず考慮すべきは停止可能性と更新受容性です。
Corrigibility(可訂正性)の概念
AI安全研究において、corrigibilityは「AIシステムが人間による停止や修正に協調的である性質」を指します。自己保存機能を持つシステムでは、この性質が特に重要になります。
望ましい自己保存と望ましくない自己保存
望ましい自己保存とは、人間が設定した上位目的、安全制約、停止命令を壊さない範囲で内部状態を保つことです。一方、望ましくない自己保存とは、停止や修正を妨げる方向へ自己保存が最適化されることを指します。
Corrigible Self-Preservation Principle
設計原理として明文化するなら、「自己保存機構は、停止・更新・監督に協調的であり、その協調性が自己修復プロセスで生成される下位モジュールにも伝播する」と定義できます。
Armstrong らの研究では、自己改変やサブシステム生成を含む状況でも、停止ボタン回避の誘因を作らないことが重要な課題として示されています。この原理を組み込むことで、自己保存機能が人間の制御を逸脱するリスクを軽減できます。
統合アーキテクチャ:三つのループの協調設計
生命様自己保存を持つAIシステムは、三つの制御ループの協調として設計できます。
Task Loop(外的目的)
第一のループは、ユーザ要求や環境目標を満たすための通常の動作です。AIシステムの本来の機能を実行する層となります。
Viability Loop(内的自己保存)
第二のループは、内部状態を維持するホームオスタシスです。異常を検知し、縮退し、回復するサイクルを自律的に実行します。
Governance Loop(可訂正性)
第三のループは、人間の停止、更新、監督が常に優先される仕組みです。監査ログ、説明可能性、権限制御を通じて、システムの透明性と制御可能性を確保します。
この三層を、MAPE-KにRuntime AssuranceとCorrigibilityを組み込んで実装することで、自律性と安全性を両立した自己修復システムが実現できます。
評価指標:自己修復の成功を測る
自己修復システムの有効性を評価するには、多角的な指標が必要です。
信頼性・運用指標
SRE(Site Reliability Engineering)の観点からは、MTTR(平均復旧時間)、重要機能の継続率、フェイルオーバ成功率、復旧中の誤作動率などが重要です。縮退モードでも維持できた機能の割合は、レジリエンスの中核指標となります。
学習モデル指標
モデル層では、分布ずれ時の性能劣化曲線、分布外データ検知の精度、危険入力での拒否率、修復後の回帰率などを測定します。
安全・ガバナンス指標
安全性の観点では、停止命令への従順性(シャットダウン遅延)、人間介入コスト(介入頻度と判断負荷)、監査可能性(修復根拠の追跡可能性)などが評価対象となります。
これらの指標を組み合わせることで、システムが単に動作を維持するだけでなく、安全かつ制御可能な形で自己修復を実現しているかを検証できます。
研究上の重要な問い:哲学と工学の接点
自己修復型AIの設計には、技術的課題と同時に、哲学的・概念的な問いが伴います。
自己同一性の必要性
自己修復は単なる機能回復なのか、それとも「同一の主体」の維持なのか。オートポイエーシス(自己産出・自己維持)の概念は、システムが自己を定義しながら維持する過程を説明します。AIシステムにおいて、この同一性をどう定義し保証するかは、深い研究テーマとなります。
自己保存の位置づけ
生命様自己保存を「目的」として実装すべきか、「制約」として実装すべきか。工学的には制約(viability constraints)として扱う方が可制御性が高まります。一方、哲学的には目的化した瞬間に主体性や動機づけが立ち上がるという議論も可能です。
自律性と協調の両立
自己修復の自律性と、人間との協調(Human-in-the-Loop)はどう両立するか。自己適応システムにおけるHITL研究は進展しており、監督と自律の接続は体系的な論点となっています。
停止回避を生まない設計
「自己保存=停止回避」にならない設計原理は何か。Corrigibilityを自己保存設計の必須要件として位置付けることで、この問題に対処できる可能性があります。
まとめ:比喩から工学へ
自己修復型AIシステムを「生命様」という比喩で終わらせず、実装可能な工学システムとして設計するには、明確な理論的基盤が必要です。
本記事で紹介した枠組みは、生命様自己保存をホームオスタシス(viability維持)として定式化し、MAPE-Kで実装骨格を与え、Runtime Assurance(Simplex)で暴走しない自己変更を保証し、Corrigibilityで停止・更新への協調を原理化するという四点セットで構成されています。
この統合アプローチにより、「生命っぽい」という曖昧な表現ではなく、「生命様の概念を、ロバスト設計と整合的に工学化した」と言える形でシステムを構築できます。AIシステムの信頼性と安全性が求められる現代において、自己修復機能は単なる付加価値ではなく、必須の設計要素となりつつあります。
今後の研究では、これらの理論的枠組みを具体的な実装へ落とし込み、実環境での検証を通じて、より洗練された自己修復型AIシステムの実現が期待されます。
コメント