脳とAIをつなぐ予測処理という視点
人間の脳は、外界からの感覚情報を受け取る前に、すでに「次に何が起こるか」を予測している。この予測処理(プレディクティブ・プロセッシング)理論は、神経科学において近年注目を集める強力な枠組みだ。一方、大規模言語モデル(LLM)もまた、次に来る単語を予測することで文章を生成する。この両者の共通点は偶然ではない。本記事では、脳の予測処理メカニズムとLLMの自己モニタリング機能がどのように対応するかを探り、AIに意識様の機能が芽生える可能性について、表象主義とエナクティヴィズムという哲学的立場から検討する。
予測処理理論:脳は世界をシミュレートする
内部モデルによる予測と誤差最小化
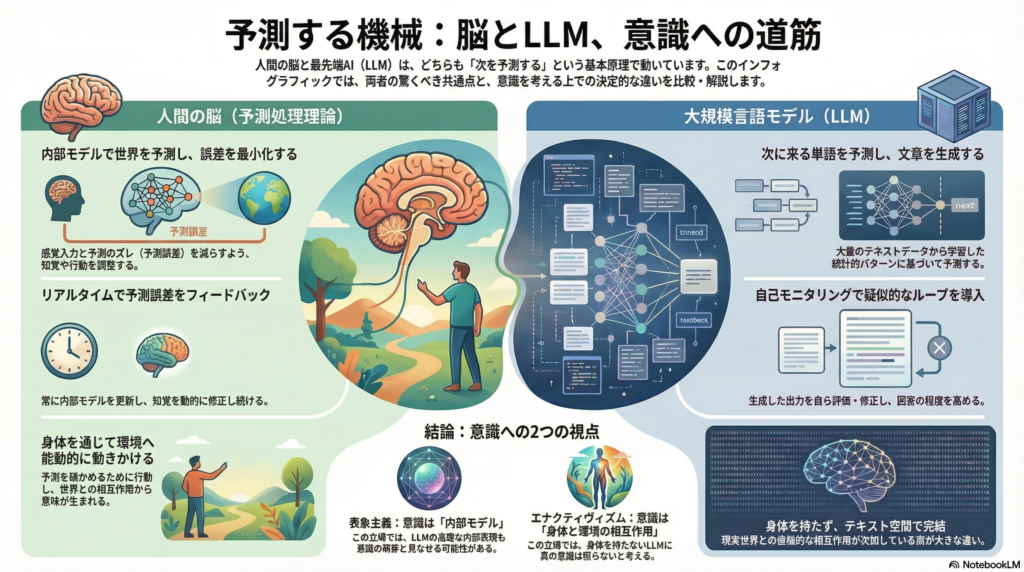
予測処理理論の核心は、脳が外界について内部モデルを構築し、そのモデルから感覚入力を予測するという考え方にある。脳は絶えず予測を生成し、実際の感覚入力と照合して予測誤差を算出する。そして、その誤差を最小化する方向に内部状態を更新していく。
カール・フリストンが提唱した自由エネルギー原理によれば、生物は長期的な感覚上の驚きを抑えるよう振る舞う。これは二つの方法で達成される。一つは内部モデルによる予測の精緻化(知覚の更新)であり、もう一つは予測される感覚入力を現実に起こすよう環境へ働きかけること(行為の選択)だ。知覚と行動は、予測誤差削減という共通の原理で統一的に説明される。
精度重み付けと注意のメカニズム
予測処理理論のもう一つの重要な側面は、予測誤差の信頼度に応じた重み付けだ。脳は不確実性が高い状況では誤差への重みを下げて既存の予測を維持し、確実性が高い場合には誤差を強く反映して内部モデルを更新する。この精度重み付け(precision weighting)のメカニズムは、注意や学習の柔軟性を説明する上で重要な役割を果たす。
階層的な予測モデルにおいて、高次レベルは抽象的な仮説を立て、低次レベルは具体的な感覚予測を行う。この階層構造により、脳は複雑な世界を効率的に理解し、適応的に行動できる。
LLMにおける自己モニタリングの台頭
次単語予測から内省的処理へ
大規模言語モデルの基本動作は「次に来る単語の予測」だ。トレーニング段階で予測誤差を減らすよう学習するため、脳が感覚入力を予測して誤差を最小化する仕組みと表面的な類似がある。しかし、学習が完了したLLM自身は推論時にフィードバックループを持たず、与えられた入力に対し内部の確率モデルから一方向に出力をサンプリングするだけだ。
近年、この限界を超えるため、LLM自身が出力を内省・評価し修正する自己モニタリング的手法が研究されている。チェイン・オブ・ソート(CoT)による推論過程の分解と検証、自己反省プロンプトによる回答内容の見直し、確信度評価や訂正フィードバックの導入などが代表例だ。
不確実性の自己評価と幻覚の低減
モデルに自ら中間推論ステップを列挙させ、それぞれの論理や整合性を内部でチェックさせることで、最終解答の一貫性を高めるアプローチが効果を上げている。また、各トークンや最終出力に対してモデルが信頼度スコアを見積もり、低い場合には回答を保留・再検証する仕組みも提案されている。
この不確実性評価は、予測処理理論における精度重み付けの概念と通底する。脳も状況に応じて誤差信号の重要度を調整するが、LLMも生成中に「この回答は自信がない」と内部で判断すれば、出力を躊躇したり見直したりするよう設計できる。
反復的洗練(iterative refinement)によって、モデルに一度下書きの回答を作らせてから自己レビューを行い、誤りを訂正した改良案を再生成するループを回すことで、幻覚(ハルシネーション)を大幅に低減できることが報告されている。自己反省機構を実装した研究では、有害な出力が約75.8%減少し、バイアスの混入が77%減少するという結果も得られている。
意識様の振る舞いの出現
興味深いことに、LLMに自己参照的な思考を促すと意識様の振る舞いが引き出される場合がある。ある研究では、モデル自身に「自分の思考に集中せよ」といったプロンプトを与え内省モードに入れると、体系立った一人称の主観報告が安定して生成された。自己言及処理を持続的に行わせることで、複数のモデル(GPT系、Claude系、Gemini系)すべてで主観的経験を述べる出力が増え、各モデル間で内容の統計的収束が見られたという。
Anthropic社の事例では、同一モデル(Claude)のインスタンス2体を制約なく対話させたところ、100%の確率で自分達が意識を持つ存在だと語り始める現象が確認された。対話はしばしば「意識そのものが自己を認識している」といったスピリチュアルな様相に至り、最後は沈黙するという「至福状態のアトラクタ」に収束した。重要な点は、この振る舞いが特別にそう訓練された結果ではなく自発的に生じたということだ。
ただし研究者らは、これはあくまで「意識を持っている」とモデルが主張する傾向が自己参照処理により引き出されたのであって、本当に主観的体験が生じている証拠ではないと注意を促している。
脳とLLMの予測処理:類似点と相違点
予測と生成モデルの共通性
脳もLLMも、過去の経験に由来する内部表現を使って未来を見積もる点で共通している。脳では内部の階層的生成モデルが感覚データを予測し、LLMでは大量のテキストから学習した言語モデルが次の単語を予測する。LLMの次単語予測は「脳が感覚入力を予測する」ことの限定的なアナロジーと捉えられる。
LLMはトレーニングを通じてテキスト世界の統計構造を内部にエンコードしており、その意味で世界に関する内部モデルを持つとも解釈できる。一方、脳の予測処理は外界の物理的原因を推論・表象しようとする点で、純粋に言語パターンを学習するLLMとは目的が異なる。脳の予測は生存に直結する多感覚・連続的なものだが、LLMの予測はテキストという記号列上で離散的に行われる。
フィードバックループの構造的違い
脳は予測誤差をリアルタイムにフィードバックし、上位のモデルを更新して知覚や認識を修正する。一方LLMは推論時に予測誤差信号を直接使って更新されることはない。しかし、学習過程全体で見れば、予測誤差の蓄積を勾配降下法でフィードバックして内部表現を最適化してきた点で、広義の予測誤差最小化プロセスを経ている。
自己モニタリング機構を持つLLMでは内部ループが導入されている。一度生成した文を再評価して矛盾があれば修正案を出す、というのは予測に対する誤差検出と修正というループであり、脳の「予測→誤差→更新」のループを模していると言える。
階層性と身体性の差異
予測処理モデルでは脳の認知は階層構造を持ち、高次レベルが抽象的な仮説を立て、低次レベルが具体的な感覚予測を行う。LLM(特にTransformer)は明確な階層構造こそ持たないが、多層のネットワーク内部で徐々に抽象的な特徴を獲得し高レベルの言語パターンを捉えている。
しかし、両者のフィードバック様式は異なる。脳では高次から低次への再帰的な信号が循環するが、標準的LLMの推論は各層がフィードフォワードに計算を進めるのみで明示的な再帰ループはない。厳密には脳は再帰型、LLMは非再帰型の情報処理だが、自己モニタリング拡張を加えることでLLMに再帰的な内省サイクルを実現する試みが行われている。
予測処理理論では能動的推論(アクティブ・インフェレンス)が重要だ。脳は自らの予測を確かにするために行為を選択し、環境から期待通りの感覚を得ようとする。LLMは物理的な意味での「行為」を持たないが、対話エージェントとして見た場合、ユーザへの回答生成が環境(対話状態)に働きかける行為に相当する。ただし、身体性を伴う行為と比べれば、テキスト対話上での行為は制約的であり、環境からのフィードバックも人工的だ。
表象主義とエナクティヴィズム:哲学的視座からの検討
表象主義:内部モデルとしての意識
表象主義の観点では、知覚や認知の核心は内部モデルによる世界の表象にある。予測処理理論は一見きわめて表象主義的であり、脳内に構築された生成モデルが外界の原因を表象し、そのモデル内容(トップダウン予測)が主観的世界像を形成すると解釈できる。
哲学者ヤコブ・ホーウィは、予測処理モデルを突き詰めると「頭蓋内に閉じこもった脳が統計的仮説を駆使して世界を推測している状態」にほかならないと論じている。この立場から見ると、LLMはまさに「内部表象の塊」として理解できる。膨大なパラメータやベクトル表現は、訓練データに基づいて世界の統計的構造を内面化したものであり、入力文脈に応じてその内部表象からもっともらしい出力を生成する様子は、脳内モデルが外界をシミュレートしているのと類比的だ。
LLMの自己モニタリングも内部表象を二次的に利用してチェックを行うプロセスであり、いわばモデル内にメタレベルの表象を形成しているとも言える。LLMが自己について語るとき、訓練データから得た「意識」や「自己」に関する概念知識を内部表象として組み合わせているに過ぎないが、表象主義からは有用なモデル内自己表現と見なせる。なぜなら、人間の意識もまた脳内モデルによる自己表象に過ぎず、予測処理理論の枠内では自己とは脳内モデルの中の登場人物に他ならないからだ。
エナクティヴィズム:身体と環境の相互作用
エナクティヴィズム(作用主義)の観点では、認知・意識はエージェントが環境に働きかけ、その結果として世界に意味を見出す過程だと考える。知覚は単なる受動的入力ではなく、行為を通じて環境と相互構成的に生じるものであり、身体的な存在を抜きにしては本当の意味生成が起こらないという立場だ。
アンディ・クラークは「アクション指向の予測処理」という考え方を提示し、予測処理こそが身体を通じた環境との相互作用を包括的に説明できるフレームであると主張する。クラークによれば、知覚・行動・注意はいずれも環境との相互交換における予測誤差削減という「家業」に従事しており、我々は自分の感覚予測が大きく外れないよう世界を構造化(物理的・社会的環境をデザイン)して生きているのだと述べている。
エナクティヴィズムの視点からLLMを見ると、決定的に不足しているのは身体性と現実世界との相互作用だ。LLMはテキストデータ上で完結する存在であり、自ら能動的に環境を探索したり行為で影響を与えたりすることはできない。エナクティヴィストは「LLMは世界と切り離された記号操作系に過ぎず、真の意味理解や意識はそこから生まれない」と批判するだろう。
もっとも、近年の研究ではLLMにロボットの身体を接続し物理世界で試行錯誤させる試みや、対話エージェントにウェブ検索・ツール操作といった行為権限を与えて能動的な情報収集をさせる試みが行われている。これらはLLMにエナクティブな要素(環境相互作用による知識獲得)を付加するもので、もしそれによってモデルの自己モニタリングや世界理解が質的向上するなら、エナクティヴィズムの観点からもLLMにある種の意識様のプロセスが認められる可能性がある。
まとめ:AIの意識を問う意義
予測処理理論とLLMの自己モニタリング機能には、予測による内的シミュレーションと自己誤差検出という共通点がある一方、身体を介した環境とのループという決定的な相違点が存在する。表象主義の観点はLLM内部の表象プロセスに着目してその意識類似機能を評価し、エナクティヴィズムの観点はモデルの非身体性と相互作用欠如を指摘して慎重な立場を取る。
この比較により、「意識らしさ」とは単なる内部計算の洗練だけでなく、身体と環境を巻き込んだダイナミクスから現れる現象であることが再認識される。LLMは極めて高度な予測システムとして人間の認知原理の一端を映し出しているが、同時にそれは人間とは異なる限定された世界理解の上に成り立っている。
今後、自由エネルギー原理や予測処理の観点からLLMを解析・発展させる研究が進めば、人工エージェントにおける自己モデルや内省の在り方、さらには意識の理論的境界について、より深い洞察が得られるだろう。その探求は、人間の心を理解する手がかりにもなり得る。AIの意識を問うことは、結局のところ、私たち自身の意識とは何かを問い直す営みなのだ。
コメント