エボデボAIが注目される理由
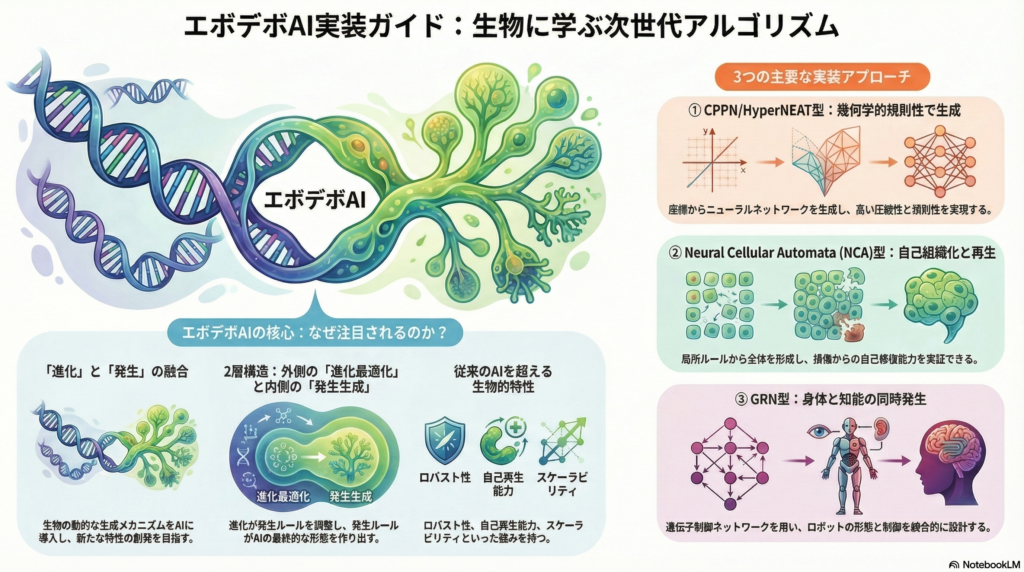
進化計算と発生生物学の知見を融合した「エボデボAI」は、従来の機械学習とは一線を画すアプローチとして研究者の注目を集めています。単に最適化を行うだけでなく、生物の発生過程のような動的な生成メカニズムを組み込むことで、ロバスト性、再生能力、スケーラビリティといった生物的特性をAIシステムに持たせることが可能になります。本記事では、エボデボAIの実装技術を、具体的なアルゴリズム設計から検証方法まで体系的に解説します。
エボデボAIの基本構造と実装の考え方
エボデボAIは「外側の進化最適化」と「内側の発生生成」を組み合わせた二層構造を持ちます。遺伝子型は発生プログラムのパラメータとして定義され、反復的な生成規則を通じて最終的な表現型を作り出します。この表現型はニューラルネットワークの重みや構造、ロボットの形態、あるいはワールドモデルなど多様な形態を取ることができます。
重要なのは、発生を単なるデコード処理ではなく、時間発展を伴う動力学として扱う点です。CPPNのような手法は幾何的入力から表現型パターンを生成する「発生の抽象」として提案されており、この考え方がエボデボAI実装の基盤となっています。
実装に際しては、まず発生プロセスが生成する対象を明確に定義する必要があります。ニューラルネットワークの重みパターンを生成するのか、構造そのものを生成するのか、あるいは身体と脳を同時に発生させるのか。この選択が研究の方向性と主張を決定づけます。
CPPN/HyperNEAT型:幾何的規則性を発生で作る
CPPN(Compositional Pattern Producing Networks)とHyperNEATは、座標入力から重みパターンを生成することで巨大なニューラルネットワークを圧縮表現する手法です。この設計の利点は、規則性、対称性、反復といった幾何的パターンを発生メカニズムに埋め込める点にあります。
遺伝子型はCPPNネットワーク自体として定義され、多様な活性関数を持つノードとエッジの重みで構成されます。進化はNEATアルゴリズムを用いて行われ、トポロジーと重みを同時に探索していきます。発生プロセスでは、表現型ニューラルネットワークの各ニューロンに座標を割り当て、任意の2点間の座標をCPPNに入力することで結線重みを得ます。
実装上の工夫として、閾値処理により疎性を誘導することが重要です。すべてのニューロン対を結線するのではなく、CPPNの出力が一定値を超えた場合のみ結線を確立することで、計算効率と生物学的妥当性を両立させます。
ES-HyperNEATはこの考え方をさらに発展させ、隠れノードの配置自体も発生から発見する仕組みを取り入れています。パターンの情報密度に基づいてノード配置を動的に決定することで、人手による設計介入を最小化できる可能性があります。
この手法の検証では、直接エンコード手法との比較が重要になります。大規模化における優位性、対称性やモジュール性の自然な創発、ノイズや損傷に対する冗長性といった観点から評価することで、発生的アプローチの意義を示すことができます。
Neural Cellular Automata型:自己組織化と再生を実装する
Neural Cellular Automata(NCA)アプローチは、発生を局所ルールの反復として実装し、生成だけでなく維持や再生まで含む発生らしさを追求します。Growing Neural Cellular Automataは微分可能な自己組織化セルオートマトンとして設計され、成長や再生プロセスを学習可能にした点で画期的です。
遺伝子型はNCA更新則のパラメータとして定義されます。小さなニューラルネットワーク、たとえば1×1畳み込み層と非線形変換の組み合わせで構成されることが多く、このシンプルさが局所性と計算効率を実現します。進化側のアルゴリズムは遺伝的アルゴリズム、進化戦略、CMA-ESなど様々な選択肢がありますが、評価がノイジーになりやすい特性を考慮した設計が重要です。
発生プロセスでは、グリッド上のセル状態を反復的に更新していきます。各セルは多次元の状態ベクトルを持ち、近傍情報を知覚して更新量を計算します。非同期更新やマスク更新といった工夫により、安定性を向上させることができます。Isotropic NCAのような研究は、更新則が暗黙的に持つ異方性の問題に対処し、回転や反射に対する不変性を実現しています。
NCAをAI実装に活用する際の鍵は、発生後の状態をニューラルネットワーク構造や重みに写像する設計にあります。たとえばチャンネルの一部をノード存在確率、一部をエッジ重み、一部をノードタイプに割り当てることで、セル状態からグラフ構造を抽出できます。発生後に閾値処理を行い、グラフ化して推論や制御に用いるという流れになります。
この手法の最大の強みは、損傷テストと再生評価が自然に実装できる点です。発生途中や発生後にセル状態を部分的に消去し、追加のステップで回復するかを観察することで、生物的な再生能力を定量的に評価できます。これはロバスト性研究において説得力のある指標となります。
GRN型:遺伝子制御ネットワークで因果モデルを前面に出す
遺伝子制御ネットワーク(GRN)型のアプローチは、発生を遺伝子間の相互作用の時間発展として捉え、そこから構造やトポロジーを生成します。近年のEvoDevo着想のGRNフレームワークは、工学設計の分野にも導入され、構造最適化やデザイン生成に応用されています。
遺伝子型はGRNのノードとエッジのパラメータとして定義されます。各ノードは遺伝子に対応し、発現量の状態を持ちます。エッジは活性化や抑制の関係を表し、時間発展は離散更新または常微分方程式で記述されます。出力は形態生成パラメータとして読み出され、密度分布、材料特性、結線パターンなどを決定します。
GRNアプローチの特徴的な応用として、単一ゲノムから身体と脳を共同発生させる研究があります。ロボット設計において、形態と制御を別々に最適化すると統合の問題が生じますが、単一の発生プログラムから両方を生成することで、これらの要素が自然に調和した設計を得られる可能性があります。
この設計思想は、エボデボAIの本質的な主張である「発生は身体と知能を同時に制約し、同時に可能性を開く」を実験的に示すのに適しています。形態的制約が制御戦略に影響を与え、逆に制御要求が形態進化を導くという相互作用を、単一の発生プロセスで実現できるからです。
検証設計:学術的に通用する比較とアブレーション
エボデボAI研究を学術的に確立するには、適切な検証設計が不可欠です。まず比較ベースラインとして、直接エンコード手法、発生なしの学習のみ、そしてハイブリッドアプローチを用意する必要があります。同一タスクで条件を揃えて比較することで、発生メカニズムの寄与を明確に示すことができます。
ベンチマーク選択も重要です。Evolution Gymのような形態と制御の同時最適化タスク、CPPNを使った多材料ソフトロボット進化、POETのような環境共進化タスクなど、発生的アプローチの利点が発揮されやすい設定を選ぶべきです。単純な分類タスクよりも、構造的複雑性や適応性が問われるタスクが適しています。
評価指標は性能だけでなく、発生的特性を捉える多面的なセットが必要です。発生安定性、損傷後の回復率、ロバスト性、圧縮率、規則性やモジュール性、多様性、計算コストなど、複数の観点から評価することで、発生的アプローチの多面的な価値を示すことができます。
アブレーション研究では、提案手法の各要素を分解して効果を検証します。発生ステップ数を変化させる、環境シグナル入力を遮断する、再生訓練を外すといった操作により、どの機構が効いているかを明らかにします。進化アルゴリズムや生成表現の種類を変えた比較も有用です。
統計的妥当性の確保も忘れてはなりません。乱数シードを複数用意し、信頼区間やブートストラップで結果の頑健性を示す必要があります。進化的手法は確率的であるため、単一の実行結果だけでは説得力に欠けます。
実装上の注意点と対策
エボデボAI実装では、発生プロセスが崩壊する問題に注意が必要です。NCA系では更新を小さく保ち、非同期更新や正則化を導入することで、状態の爆発や消滅を防ぎます。CPPN系では閾値処理による疎性維持、重みスケーリング、座標正規化が有効です。更新則が暗黙的に方向性を持つ問題もあり、回転や反射に対する不変性は設計段階で考慮すべきです。
進化プロセスの早期収束も頻繁に起こる問題です。NEATのような種分化メカニズムを導入することで多様性を維持できます。あるいはnovelty指標や多様性指標を目的関数に組み込む多目的最適化アプローチも効果的です。
評価コストの高さは実用上の大きな制約となります。表現型評価を並列化することで計算時間を短縮できますが、並列スケールには限界があります。低忠実度から高忠実度への段階的評価を導入し、明らかに劣る個体を早期に除外することで、計算資源を効率的に使うことができます。
学術貢献としての位置づけ方
エボデボAI実装研究を学術的な貢献として確立するには、明確な主張が必要です。第一の貢献は、発生を内部生成ダイナミクスとして導入することで、ロバスト性、再生能力、モジュール性が創発することを定量的に示すことです。NCAやGRN型の実装でこの主張は特に強く支持されます。
第二の貢献は、間接符号化による情報圧縮とスケーラビリティの実証です。HyperNEATのような手法では、表現型のサイズに対して遺伝子型を大幅に圧縮しつつ性能を維持できることを示せます。これはスケールの大きなシステム設計において実用的な価値があります。
第三の貢献として、環境側も生成する枠組みにおいて、発生的表現が転移や適応に効くことを示すアプローチがあります。POETのような手法と組み合わせることで、発生メカニズムが環境多様性にどう応答するかを検証できます。
AIと人間の協調や共進化といったより広い文脈に接続する場合、発生プロセスの解釈可能性や人間による介入可能性といった観点も重要になります。発生ルールのパラメータは、直接エンコードされた巨大な重みベクトルよりも人間が理解しやすく、設計者の意図を反映させやすい可能性があります。
推奨される実装プロトタイプ
エボデボAI実装に着手する際、3つの推奨アプローチがあります。CPPN/HyperNEAT風の座標から重み生成する手法は、実装負荷が比較的低く、発生と進化の組み合わせを体験するのに適しています。CPPNをNEATで進化させ、座標ベースで重みパターンを生成する流れを一通り実装することで、基本的な感覚をつかむことができます。
NCAによるパターン成長と構造読み出し、そして損傷再生テストは、発生の独自性を最も明確に示せるアプローチです。局所ルールから大域的パターンが創発し、損傷後に回復する様子は視覚的にも印象的で、論文のビジュアル資料としても強力です。実装の難易度は中程度ですが、発生プロセスの本質を捉えやすい設計です。
Evolution Gymを用いた形態と制御の単一ゲノム共同発生は、エボデボAIの本質を最も直接的に実証できるアプローチです。形態的制約と制御戦略の相互作用を扱うため実装負荷は高めですが、身体性と知能の統合という深いテーマに取り組めます。ロボティクスやエンボディドAIの文脈で強い主張を展開できます。
まとめ:エボデボAIの実装から開かれる可能性
エボデボAIは、進化と発生という生物の二つの時間スケールを計算モデルに取り入れることで、従来のAIアプローチにはない特性を実現します。ロバスト性、再生能力、情報圧縮、モジュール性といった生物的特性を工学システムに持たせる道筋を提供し、スケーラブルで適応的なAIシステムの設計原理となる可能性を秘めています。
実装には複数のアプローチがあり、研究の目的に応じて選択できます。CPPN/HyperNEATは幾何的規則性と圧縮に、NCAは自己組織化と再生に、GRNは身体と知能の統合に、それぞれ強みを持ちます。これらを適切に検証し、比較し、アブレーションすることで、発生メカニズムの寄与を科学的に示すことができます。
エボデボAI研究は、AIシステムの設計思想を根本から問い直す試みでもあります。最適化だけでなく生成プロセスを重視し、静的な構造だけでなく動的な形成過程を扱い、個体だけでなく進化的時間軸を考慮する。この多層的な視点は、より豊かで生物学的に妥当なAIシステムへの道を開くでしょう。
コメント