はじめに:身体性AIに「4E認知」が必要な理由
人工知能研究において、知能を「頭の中の情報処理」だけで捉える時代は終わりつつあります。ロボットが家庭で片付けをする、人と協働して作業する、道具を使いこなす――こうした身体性AI(Embodied AI)の実現には、身体・環境・行為・外部資源を含めた統合的な視点が不可欠です。
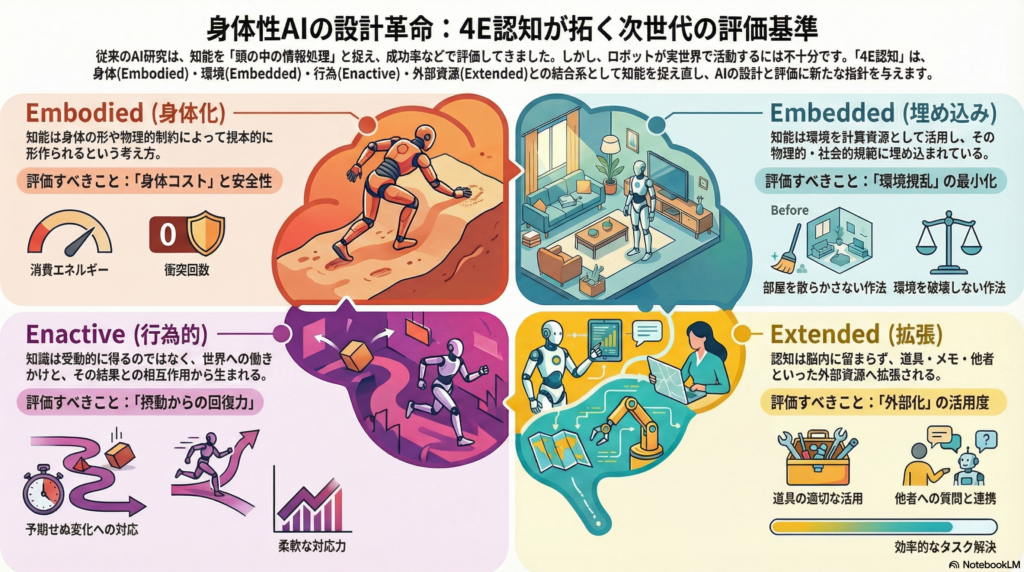
その理論的基盤となるのが「4E認知」です。4Eとは、Embodied(身体化)、Embedded(埋め込み)、Enactive(行為的)、Extended(拡張)の4つの観点から認知を捉える枠組みで、知能を身体と環境の結合系として理解します。しかし、この理論を「実装可能な環境設計」や「測定可能な評価指標」に翻訳できなければ、研究は前に進みません。
本記事では、4E認知を単なる理念に終わらせず、AIの学習環境設計と評価指標構築の実践的な指針として活用する方法を解説します。
4E認知理論の基礎:知能を「結合系」として捉える
4つのEとは何か
4E認知は、従来の「表象中心の認知科学」を超えて、知能を身体・環境・行為を含む動的システムとして理解する立場です。
**Embodied(身体化)**は、身体の形態・感覚・運動制約が認知を根本的に形作るという視点です。人間が「上」「下」という概念を持つのは、重力に抗して立つ身体を持つからであり、ロボットの知能も同様に、その身体構造に依存します。
**Embedded(埋め込み)**は、認知が物理的・社会的・文化的環境に埋め込まれていることを強調します。環境は単なる背景ではなく、問題解決の計算資源そのものです。家庭での片付けを考えれば、物の配置慣習や収納の規範が、タスク遂行の前提条件となります。
**Enactive(行為的)**は、知識が受動的な表象ではなく、行為を通じて世界との相互作用の中で立ち上がるという考え方です。ドアノブの「回す」という意味は、実際に回してドアが開く経験を通じて獲得されます。
**Extended(拡張)**は、認知が脳内に閉じず、道具・メモ・他者といった外部資源へと延長されるという視点です。Clark & Chalmersの「延長された心」の議論が示すように、スマートフォンのメモ帳は、私たちの記憶システムの一部として機能します。
なぜ身体性AIに4Eが重要なのか
従来のAI研究では、成功率や効率といった単一の指標で評価されることが一般的でした。しかし、家庭用ロボットが高い成功率を達成しても、部屋を散らかしたり、人間の配置慣習を無視したりすれば、実用には程遠いでしょう。
4E認知の視点は、「何を設計し、何を測るべきか」という問いに答えを与えます。身体制約をどう組み込むか(Embodied)、環境の規範をどう学習させるか(Embedded)、探索と介入の循環をどう設計するか(Enactive)、外部資源の利用をどう評価するか(Extended)――これらは、身体性AIの環境設計において避けて通れない課題です。
Embodied:身体制約を学習の地形として設計する
身体が認知を形作るメカニズム
身体性の本質は、「身体があるから制約される」だけでなく、「身体があるから獲得できる知識がある」という点にあります。人間が物の重さを判断する際、視覚情報だけでなく、持ち上げる際の筋感覚が重要な役割を果たします。同様に、ロボットも接触・摩擦・質量といった身体的フィードバックを通じて、物体の性質を理解する可能性があります。
効果的な学習環境の設計レバー
物理忠実度の適切な設定が第一のレバーです。ただし、「高ければ良い」わけではありません。タスクに必要十分な物理シミュレーションを選択することが重要です。把持タスクであれば、接触力と摩擦が重要ですが、ナビゲーションタスクでは簡略化した物理モデルでも十分な場合があります。
部分観測と能動知覚の組み込みも重要です。引き出しの中、物体の背面、遮蔽された領域など、「見に行かないと分からない」配置を設計することで、受動的な画像認識ではなく、身体を使った情報収集が学習の中心になります。
身体コストの可視化により、効率的な運動戦略の学習を促します。移動距離、消費エネルギー、関節トルク、加減速の滑らかさ(jerk)などを記録し、最適化の対象とすることで、身体制約を「解くべき問題」として明示化します。
既存ベンチマークの活用例
ManiSkillは、操作スキルに特化した物理シミュレーション基盤として、把持・操作における身体性を前面に出しています。BEHAVIORベンチマークは、位置変更だけでなく、温度・湿り気・清潔さといった「内部状態」の変化を含む家庭活動を扱い、物理相互作用が本質的な役割を果たす設計になっています。
Embedded:環境を計算資源・制約・規範として活用する
環境は背景ではなく、知能の一部
Embeddedの視点では、環境は単に問題が設定される「場所」ではなく、問題解決のための資源や制約そのものです。人間が家庭で効率的に片付けられるのは、「食器は食器棚」「本は本棚」という配置慣習を知っているからです。この「埋め込まれた知識」をどう学習させるかが、Embeddedな環境設計の核心です。
生態学的妥当性の確保
**生態学的妥当性(ecological validity)**とは、実世界での典型的な状況を再現することです。家庭環境であれば、物体の密度、散らかり具合、収納の仕方、動線といった「ありがちな」配置を再現します。整然とした実験室環境でうまくいっても、雑然とした実環境で失敗するようでは意味がありません。
長期地平と不可逆性の導入
長期タスク(long-horizon tasks)と不可逆な状態変化を組み込むことで、環境への配慮が必須になります。液体をこぼす、物を汚す、火をつけるといった不可逆的な失敗は、慎重な計画を促します。
**環境攪乱(scene disruption)**を評価指標に含めることで、「乱暴に成功する」戦略を排除できます。目標は達成したが、部屋中の物を散乱させたり、本来の配置を破壊したりする行動は、Embeddedな知能とは言えません。
実装における参考事例
BEHAVIORベンチマークは、成功の有無だけでなく、シーン攪乱や探索・操作量を効率指標としてログ化しています。BEHAVIOR-1Kは、「人々がロボットに何をしてほしいか」という実際の調査に基づき、1,000の家庭活動を定義し、環境に埋め込まれた多様な課題を扱います。
Enactive:行為と結果の循環で意味を立ち上げる
探索と介入が主役になる設計
Enactiveな視点では、知識は「正解ラベル」として与えられるものではなく、行為が世界をどう変え、その変化が次の行為をどう導くかという循環の中で獲得されます。ドアノブを回せばドアが開く、スイッチを押せば照明がつく――こうした感覚運動随伴性(sensorimotor contingency)が、意味の基盤を形成します。
介入可能性の最大化
**高い介入可能性(interactivity)**を持つ環境を設計します。押す、開ける、注ぐ、混ぜる、拭くといった多様な行為が、世界の状態遷移として明示的に表現される必要があります。単に「物を見る」だけでなく、「物を動かして何が起こるか」を経験できる環境が、Enactiveな学習を促進します。
探索が構造獲得につながる設計
最短経路でゴールに到達するより、道具や因果関係を「発見」しないと進めない設計が効果的です。たとえば、高い場所の物を取るには脚立が必要、汚れを拭くには雑巾が必要、といった構造を、試行錯誤を通じて獲得させます。
摂動への対応能力
途中で物が落ちる、他者が環境を変更する、ドアが閉まるといった環境摂動を導入することで、固定的な計画ではなく、リアルタイムでの方略更新が必要になります。これは、Enactiveな知能の本質である「状況に応じた適応的な行為」を評価する上で重要です。
プラットフォームの活用
Habitatは、ナビゲーションを中心としたembodied AIのシミュレーション基盤として、環境との相互作用を通じた知能を前面に出しています。Habitat 3.0では、人間・アバター・ロボットが共存する環境での協働タスクまで扱う方向に拡張されており、より動的なEnactive評価が可能になっています。
Extended:外部化を可能にする環境設計
延長された心としてのAI
Clark & Chalmersの「延長された心(extended mind)」の議論は、認知が脳内に閉じていないことを示しました。メモ帳に書いた情報は、脳内の記憶と同様に認知システムの一部として機能します。身体性AIにおいても、内部状態だけで問題を解くより、外部記憶・道具・他者を活用する方が合理的な場合が多々あります。
外部記憶媒体の提供
外部記憶媒体を環境に組み込むことで、AIが「覚えきれない」情報を外部化できるようにします。メモ、ラベル、ホワイトボード、チェックリスト、地図、タイマーといった媒体を利用可能にし、それらの使用頻度や効果を評価します。
人間は複雑なタスクを遂行する際、頻繁にメモを取ります。「牛乳を買う」とメモすることで、記憶のリソースを他の思考に割り当てられます。AIも同様に、外部記憶を使うことで、より複雑なタスクに対応できる可能性があります。
道具使用の必要性
道具がないと達成困難な活動を意図的に混ぜることで、道具使用の学習を促します。雑巾がなければ床を拭けない、トングがなければ熱い物を掴めない、脚立がなければ高い場所に届かない――こうした制約を設けることで、道具の適切な選択と使用が評価対象になります。
社会的拡張:対話と協働
人に質問する、共同で作業を分担するといった社会的拡張も、Extendedな知能の重要な側面です。不確実性がある場合、AIが人間に質問して情報を得ることで、タスク遂行が効率化される可能性があります。また、協働でのみ達成できるタスクを設計することで、社会的知能の評価が可能になります。
既存研究の参照
TEAChベンチマークは、家庭環境でタスクを達成するための対話を評価する枠組みを提案しています。人間同士の対話ログをデータ化し、対話理解・言語接地・実行を統合的に評価します。ALFREDは、自然言語指示と長い行動列、不可逆な状態変化を含む家庭タスクを扱い、言語を含む拡張を絡めた設計になっています。
3階層の学習タスク設計:破綻しにくい構造化
環境を4E化しても、タスクが単発的では評価の質が低下します。マイクロ技能、メゾ活動、マクロ協働の3階層構造で設計することで、体系的な評価が可能になります。
マイクロ技能層(Embodied寄り)
最も基礎的な層では、身体的な技能を評価します。把持、押す、開閉、注ぐ、拭く、姿勢制御、視点移動(能動知覚)といった、単一の感覚運動スキルがこの層に含まれます。
これらは、より複雑なタスクの構成要素となるため、個別に評価可能にすることが重要です。把持ができなければ片付けもできず、視点移動ができなければ探索も効率的に行えません。
メゾ活動層(Embedded+Enactive寄り)
中間層では、複数の技能を組み合わせた活動レベルのタスクを扱います。片付け、掃除、準備、整理、調理の下準備など、状態遷移が複合的で長期にわたるタスクがこの層に該当します。
この層では、環境の規範(どこに何を置くべきか)や、行為の順序(何を先にすべきか)といった、EmbeddedとEnactiveな知識が重要になります。
マクロ協働層(Extended寄り)
最上層では、外部資源や他者との協働を含むタスクを評価します。指示の追従、対話による不確実性の解消、共同作業、ユーザーの好みへの適応といった、Extendedな能力が問われます。
この3階層構造により、「身体制約の技能がないから活動ができない」問題と、「活動はできるが協働・外部化が測れない」問題を分離できます。
測定可能な評価指標の構築:4Eを定量化する
4E認知を実装レベルで活用するには、それぞれのEが「測定可能」である必要があります。ここでは、既存の評価指標を土台としつつ、4Eに対応した指標セットを提案します。
成功と進捗の連続化
従来の二値的な成功判定(成功/失敗)だけでは、Enactiveな視点である「途中の意味形成」が見えません。BEHAVIORベンチマークが提案する進捗スコアは、ゴール条件(論理式)に対して、どこまで達成できたかを連続的に測る指標です。
たとえば、「部屋を片付ける」タスクで、5つのゴール条件のうち3つを満たした場合、進捗スコアは0.6となります。この指標により、完全に失敗したのか、ほぼ成功に近かったのかを区別できます。
効率の多面的評価
単一の効率指標では、4Eの豊かさを捉えきれません。BEHAVIORは以下のような多面的な効率指標を提案しています。
シミュレーション時間は、タスク完了までにかかった時間です。移動距離は、ロボットの本体および手の移動量を測ります。環境攪乱は、物理的な乱れ(本来の位置から動いた物体の数)と論理的な乱れ(本来の状態から変化した属性の数)の両方を評価します。
この多面的評価は、Embeddedな視点、つまり「環境を壊さない作法」を定量化する上で非常に有効です。成功率が同じでも、環境攪乱が少ない方が、環境に配慮した知能と言えます。
人間基準での正規化
4Eの「環境・社会規範」を評価に組み込む強力な方法は、人間を正規化の基準として使うことです。BEHAVIORは、VRデモを通じて人間がタスクを遂行した際のデータを収集し、AIの効率を人間に対して相対化する「human-centric efficiency」を提案しています。
ただし、「人間らしさ=正しさ」と同一視しないよう注意が必要です。人間の行動にもバイアスや非効率が含まれる可能性があるためです。
ナビゲーション評価の進化
ナビゲーションタスクでは、**SPL(Success weighted by Path Length)**が標準的な評価指標です。これは、成功したかどうかを、最短経路に対する実際の経路長で重み付けする指標です。
しかし、SPLはロボットのダイナミクス、特に旋回半径や加速制約を十分に評価できない場合があります。そこで、SCT(Success weighted by Completion Time)のように、完了時間を含めた評価も提案されています。4EのEmbodiedを真正面から測るなら、距離だけでなく、身体ダイナミクス込みの時間や安全性を併用する方が合理的です。
4Eスコアカード:新規性のある評価指標セット
既存指標を土台としつつ、4Eの各観点を明示的に測定する指標セットを提案します。これは研究の新規性として位置づけやすい領域です。
Embodied指標:身体に根ざした熟達
安全性は、衝突回数、過大接触力、転倒、物体破損といった、身体と環境の物理的相互作用における問題を測ります。身体コストは、消費エネルギーの近似値、関節トルクの総量、加減速の滑らかさ(jerk)などを評価します。
クロスエンボディメント転移も重要な指標です。同一タスクを異なる身体形態(別のロボット)でも達成できるかを測ることで、身体固有の知識と汎用的な知識を区別できます。Open X-Embodimentプロジェクトは、異なるロボットの軌跡データを統合する取り組みとして、この文脈での参照になります。
Embedded指標:環境への適応と配慮
攪乱最小化は、BEHAVIORの物理的・論理的攪乱指標を一般化したものです。文脈頑健性は、散らかり具合、遮蔽率、物体初期配置の分布を変化させたときの性能劣化曲線を測ります。
規範遵守は、ユーザーの配置の好みや片付けのスタイルを満たす割合を評価します。たとえば、「この家では本はジャンル別に並べる」という嗜好を学習できるかを測定します。
Enactive指標:意味の創発と適応
摂動からの回復は、途中で状態が乱された際の成功率、追加コスト、回復時間を測ります。予期しない変化に対して、どれだけ柔軟に対応できるかが問われます。
探索の質は、単なる歩き回りではなく、情報利得(未知状態の解消)に結びついた探索ができているかを評価します。因果的適応は、環境操作(道具使用や状態変化)によって成功確率がどれだけ向上するかを測り、介入の価値を定量化します。
この領域は既存ベンチマークでの指標が薄いため、Enactiveを測る指標提案は研究貢献として立ちやすい領域です。
Extended指標:外部化の活用度
外部記憶利用率は、タスク中に外部メモを参照・更新した回数や、外部記憶への依存度を測ります。道具の適切性は、道具選択の正解率と、道具使用がない場合との性能差(反事実的比較)を評価します。
対話効率は、質問回数、情報獲得量、タスク短縮効果を測ります。TEAChベンチマークのように対話を含めた評価の実例があり、これを拡張する形で指標化できます。
ログ設計とBenchmarkability:再現可能な研究のために
4E環境は豊かで複雑になりがちなため、研究の再現性を確保するには、環境設計時点で適切なログ機構を仕込む必要があります。
状態の二重表現
物理状態(位置、速度、接触)だけでなく、論理・記号状態(ゴール条件のリテラル、属性の状態)を並行して記録します。BEHAVIORは、ゴール条件を論理式として扱い、これに基づいて進捗スコアを定義しています。
この二重表現により、「物理的には動いているが、タスク的には進んでいない」といった状況を区別できます。
成功の仕方を分解可能にする
探索、操作、攪乱、時間、移動、対話といった異なる側面を別々のログとして残すことで、成功率という単一指標に押しつぶされないようにします。同じ成功率でも、その達成方法が大きく異なる可能性があります。
人間ベースラインの収集
VRやテレオペレーションを通じて人間がタスクを遂行する際のデータを収集し、AIの性能を人間に対して正規化する設計は、4E(特にEmbeddedとExtended)の評価と相性が良い方法です。
既存環境の戦略的活用:ゼロから作らない研究設計
新しい環境をゼロから構築するより、既存のベンチマークを4Eの観点で組み替え、評価指標を追加する方が、学術論文として堅実です。
家庭内タスクの包括的評価
BEHAVIOR(100活動)とBEHAVIOR-1K(1,000活動)は、家庭内の長期タスク、多物体操作、状態変化を扱う代表的なベンチマークです。特にBEHAVIOR-1Kは、人間のニーズ調査に基づいており、実用的な活動を網羅しています。
これらは、EmbeddedとEnactiveな評価に適しています。
大規模ナビゲーションとエゴセントリック視覚
Habitatは、大規模環境でのナビゲーションとエゴセントリック視覚に基づくタスクのプラットフォームです。SPLやSCTといったナビゲーション評価指標を適用でき、EmbodiedとEnactiveな側面を測定できます。
Habitat 3.0は、人間・アバター・ロボットの共存環境での協働タスクまで扱う拡張版で、ExtendedとEmbeddedな評価にも対応します。
言語指示と対話の統合
ALFREDは、自然言語指示と家庭タスクを組み合わせたベンチマークで、言語を含むExtendedな能力を評価できます。TEAChは、対話を通じたタスク遂行を評価する枠組みで、人間との協働(Extended)を直接的に扱います。
操作技能の集中的訓練
ManiSkillは、把持や操作といった身体的技能に特化したベンチマークで、Embodiedな側面の詳細な評価に適しています。
これらの既存環境を組み合わせることで、4Eの各側面を体系的に評価する研究デザインが可能になります。
研究論文としての構成:提案の形に落とすテンプレート
4E認知に基づく環境設計と評価指標を、学術論文の形に落とし込む際の典型的な構成を示します。
研究貢献の明確化
- 4E-Environment Design Framework:4E認知理論から環境要件、タスク要件、ログ要件への変換原理を体系化
- 4E-Metric Suite:成功率中心の評価から、攪乱・回復・外部化・人間正規化を含む複合評価への拡張
- ケーススタディ:既存ベンチマーク(BEHAVIOR/ALFRED/TEACh/Habitat等)へ指標を実装し、同一エージェントでも評価軸によって順位が変わることを示す
実験デザインの例
Ablation studyで4Eを実験的に分離するアプローチが効果的です。
- Embodied: 身体形態、センサー特性、遅延、ノイズを変える
- Embedded: 散らかり具合、配置慣習、ユーザー嗜好を変える
- Enactive: 摂動の注入、隠れ状態の導入、探索の必須化
- Extended: 外部メモ、道具、対話の可否を変える
各条件で、成功率、進捗、効率、攪乱、回復、外部化といった複数の指標を報告することで、4Eの各側面がどう性能に影響するかを明らかにできます。
まとめ:4E認知から実装への橋渡し
4E認知理論は、身体性AIの設計と評価に対して、単なる理念以上の実践的な指針を提供します。Embodiedは身体制約を学習の地形として設計すること、Embeddedは環境を計算資源として活用すること、Enactiveは行為と結果の循環を重視すること、Extendedは外部資源の利用を評価することを意味します。
重要なのは、これらを「測定可能な指標」に翻訳することです。成功率だけでなく、進捗、効率、攪乱、回復、外部化といった多面的な指標を設計し、3階層(マイクロ技能、メゾ活動、マクロ協働)で構造化することで、破綻しにくい評価体系が構築できます。
既存のBEHAVIOR、Habitat、ALFRED、TEAchといったベンチマークは、4Eの視点で再解釈し、指標を追加することで、より豊かな評価基盤として活用できます。新しい環境をゼロから作るより、既存資源を戦略的に組み合わせる方が、研究としての堅実性と再現性を確保しやすいでしょう。
身体性AIが真に実用的な知能を獲得するには、4E認知に基づく環境設計と評価指標の構築が不可欠です。本記事で提示した枠組みが、この分野の研究を前に進める一助となれば幸いです。
コメント