AIは本当に「意味」を理解しているのか
ChatGPTやClaude、Geminiといった大規模言語モデル(LLM)が流暢な文章を生成する様子を見ると、私たちはつい「AIが言葉の意味を理解している」と感じてしまいます。しかし、これらのAIは本当に言葉が指し示す対象や概念を「理解」しているのでしょうか。それとも、単に統計的パターンを操作しているだけなのでしょうか。
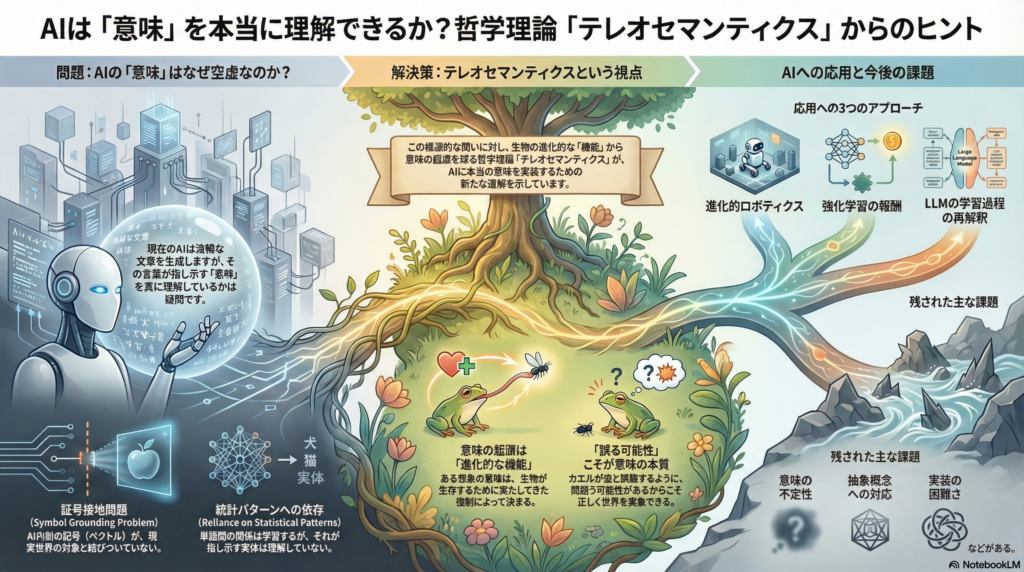
この根源的な問いに対して、**テレオセマンティクス(目的論的意味論)**という哲学理論が新たな視座を提供しています。本記事では、テレオセマンティクスの基本概念を解説し、AIの意味理解に応用する最新研究と、その可能性・限界について掘り下げます。
テレオセマンティクスとは何か:進化が生み出す「意味」
生物学的機能から意味を説明する
テレオセマンティクスは、心的内容(意味)の由来を生物学的機能や目的によって説明しようとする理論です。従来の意味論が「記号と対象の関係」を抽象的に扱うのに対し、テレオセマンティクスは「なぜその表象がその意味を持つのか」を、進化上の役割や適応的機能から説明します。
この理論の核心は、志向性(何かについてであること)の自然化にあります。つまり、心的状態が世界の特定の事柄を「指し示す」という不思議な性質を、物理的・生物学的プロセスの中で説明しようとするのです。
誤表象の可能性が真の表象を定義する
テレオセマンティクスの重要な洞察の一つは、誤った表象(誤謬性)の可能性こそが真の表象の本質だという点です。単なる因果的な反応では誤りは起こりえません。例えば、温度計が気温に反応するのは因果関係であって、温度計が「誤る」とは言いません。
しかし、生物の心的表象は誤りうるものです。カエルが黒い点を虫と誤認して舌を伸ばすとき、それは「本来は虫を指し示すべき表象」が誤って発火したと言えます。この「~すべき」という規範性を、テレオセマンティクスは進化的に獲得された機能として説明します。
主要理論家の貢献:ドレツケ、ミリカン、パピノー
ドレツケの「指示する機能」
哲学者F.ドレツケは、心的状態を単なる「指示(インジケーション)」ではなく**「指示する機能」**を持つ状態と見なすことで、自然的な誤表象を可能にしました。
純粋な因果情報だけでは「常に事実が存在する場合にしか成り立たず、誤りは起こりえない」のですが、進化や学習によって獲得された「~を指示すべき」という機能を付与すれば、その機能が果たされない場合に誤表象が生じます。これにより、表象が環境を誤って捉えるエラーの生物学的説明が可能になります。
ミリカンのバイオセマンティクス
哲学者R.ミリカンの「バイオセマンティクス」は、表象の内容を**「適応的機能(proper function)」**によって定義します。
ミリカンの理論の核心は二点です。第一に、あらゆる表象は生物内の**「表象の生成者(プロデューサー)」と「表象の消費者(コンシューマー)」**の間で受け渡されるメッセージであること。例えば、カエルの視覚系が小さく動く黒い点を検出して神経信号を発し(生成者)、運動系がそれを受け取って舌を伸ばす行動を起こす(消費者)という形です。
第二に、各表象が対応する特定の外界状態を**マップ(対応)していることが、消費者が本来の機能を正常に発揮するために必要です。この対応関係によって定まる外界の状態こそが、表象の内容(意味内容)**になります。
パピノーの成功意味論
哲学者D.パピノーの理論は、欲求(目的)の役割を強調する点で特徴的です。パピノーはまず「欲求の内容」を、それが生物学的に生み出すことを目的としている効果と同一視します。
次に信念の内容は、欲求を満たすために行動が成功する条件として定義されます。例えば、「食べ物を手に入れたい」という欲求を持ち、「冷蔵庫に食べ物がある」という信念に基づいて冷蔵庫を探す行動を起こした場合、その命題が真であれば欲求が行動によって満たされます。したがって信念内容は行為の成功条件として与えられるのです。
この「成功意味論(success semantics)」は、信念・欲求の志向性を生物学的機能で捉え直す強力なアプローチです。
現代AIが抱える「意味」の問題
ベクトル空間に閉じ込められた意味
現代の人工知能、特に大規模言語モデルでは、「意味」は高次元ベクトル空間内の点として表現されます。単語埋め込みや文脈ベクトルは、確かに統計的なパターンを捉えていますが、それ自体が外界の具体的対象を指示しているわけではありません。
LLMは大量のテキストから学習して一見意味の通る文章を出力しますが、直接に現実世界と相互作用していないために、その内部状態や出力が人間にとって意味を持つ対象を本当に「指している」のか疑問が残ります。
シンボルグラウンディング問題の再来
この問題は、AIにおける古典的難題である**「シンボルグラウンディング問題」**と深く関わります。形式記号(プログラム内の記号列やニューラルネットワーク内のベクトル)が、いかにして人間の介在なしに実世界の意味を獲得できるのかという問いです。
ジョン・サールの「中国語の部屋」の議論が示すように、単に記号操作を行うだけではその記号に「意味が付与されている」とは言えません。現在のディープラーニングシステムでは、大量のデータに対するパターン認識が行われますが、その内部表現が具体的に何を指しているのかは開発者が付与するか、外部から解釈するほかありません。
テレオセマンティクス的な観点から見ると、現行のAIには本来的な意味の担い手となる条件(進化的歴史や目的志向の役割)が欠如していると言えます。
テレオセマンティクスをAIに応用する試み
進化的ロボティクスによる意味の獲得
テレオセマンティクスの条件をAIに満たす一つの方法は、**進化的手法やエンボディメント(身体性)**を通じたアプローチです。進化的ロボティクスや遺伝的アルゴリズムを用いてエージェントを世代交代・適者生存のプロセスで進化させれば、その内部表現に機能的役割を持たせることができる可能性があります。
Liら(2022)の研究では、カレン・ニーダーの情報テレオセマンティクス理論と進化ロボット実験を組み合わせ、シンボルグラウンディング問題への新たな解決策を示唆しています。彼らの実験では、光に誘引されて充電ステーションへ向かうロボットを用い、世代を重ねることでセンサー・モーター系が外界の特定の要因に反応するよう選択され、その内部シンボルに意味が固定されていくことが示されました。
大規模言語モデルにおける意味の可能性
驚くべきことに、一部の研究者は純粋なテキストベースのLLMであっても、適切な条件下では参照的な意味の接地が可能だと主張しています。
Mollo & Millière(2023)は、LLMの内部状態が意味を持ちうる条件として「(1)世界に関する適切な因果・情報的関係を持つこと」と「(2)それらの状態がその情報を運ぶ機能を付与されるような選択の歴史を持つこと」の二点を挙げています。
彼らの論点は、インターネット上のテキストが間接的に世界の事実を反映しており(因果・情報関係)、さらにモデルの**学習過程自体が一種の「選択史」**として機能を付与すると解釈できるというものです。訓練目標(次語予測のタスク)を果たすという機能的目的のもとで内部表現が選択されてきたと見做せば、テレオセマンティクス的な意味の担い手になり得るというわけです。
BDIアーキテクチャと強化学習の融合
もう一つの方向性は、信念-欲求-意図(BDI)アーキテクチャの採用です。エージェントに明示的な「欲求(目標)」と「信念」を持たせ、それらの組み合わせで行動決定を行えば、テレオセマンティクス的に各内部状態の内容を定義しやすくなります。
例えば、AIロボットが「電池残量を回復したい」という目標を持ち、「近くに充電ステーションがある」という信念に基づいて行動するとき、「充電ステーションが近くにある」という信念内容が真であれば目標が達成されます。したがって、その信念状態はまさにその命題内容を指示しているとみなせます。
さらに、強化学習の報酬を生物学的適応に類比させることも可能です。Fumagalli & Ferrario(2019)は、報酬信号を進化における適応度(選択圧)に相当するものとして形式化できると述べています。これは、強化学習エージェントの内部表現に「報酬をもたらす環境の状態」を指示する機能が与えられる可能性を示唆します。
テレオセマンティクスが拓く新たな可能性
意味の接地と説明可能性の向上
テレオセマンティクスの導入によって、AIにおける「意味の表象と操作」は新しい展望を得られます。第一に、意味の接地(グラウンディング)が体系的になされることで、AIが扱う内部表象に指示対象との因果的紐付けと機能的役割を持たせることが可能になります。
これは、単なるデータ上の相関に留まらない本質的に意味のある表現を生み出すことにつながります。因果的に世界と結びついたセマンティックな接地は、自然知能・人工知能を問わず極めて重要です。
将来的に、進化的過程を経たロボットや目的駆動型のエージェントを設計できれば、そうしたAIは環境中の事象を自律的に「意味付け」し、状況を誤って表象した場合には自らの機能不全として検知・学習するような誤表象の自己訂正も可能になるでしょう。
AIの内部状態を「信念」として扱う
このようなシステムでは、AIの内部状態を単なるデータ処理の中間産物ではなく**「世界についての信念や表象」**とみなして扱えます。人間がAIの推論過程を解釈し説明する際にも、「この内部表現は何を指し示しているか」を語りやすくなるという利点があります。
テレオセマンティクスに基づく意味モデルは、**AIの説明可能性(XAI)**や信頼性向上にも資する可能性を秘めています。
克服すべき課題と限界
内容の不定性問題
テレオセマンティクスの応用には克服すべき課題も存在します。第一に挙げられるのは、内容の不定性(インデターミナシー)の問題です。
ある表象に対してその機能から内容を定義しようとしても、機能の記述次第で内容が複数に解釈できてしまう恐れがあります。例えば、ドレツケの示した磁気細菌の例では、細菌内の磁気センサーの機能を「低酸素の泥地へ誘導すること」と見るか「地磁気の北方向を指し示すこと」と見るかで、その表象内容が異なってしまいます。
同様に進化ロボットの例でも、「光に向かう」行動の表象は「光そのもの」を指すのか「光の先にある充電エリア」を指すのかが曖昧になるケースがあります。このディスジャンクション問題に対処する必要があります。
歴史的選択過程の要請
第二に、歴史的な選択過程の要請という制約があります。テレオセマンティクスでは、心的内容は進化史や学習史といった過去の選択プロセスによって規定されるため、極端な思考実験である「スワンプマン」(沼地から偶発的に出現した人間の完全なコピー)のように歴史を持たないシステムには本来的な内容を認めません。
この点は人工的に設計されたAIにも当てはまり、「人間が一から設計・プログラムしたAIには本来的志向性がないのではないか」という批判につながります。ただし、AIの開発・訓練プロセス自体を一種の選択史と見なすことも可能であり、この制約をどこまで緩和できるかが議論の的です。
抽象概念への対応
第三に、抽象的・高次の概念内容への対応という課題もあります。テレオセマンティクスは生物の環境への適応という観点から意味を定義するため、「食物」「捕食者」「光」等の具体的で生存に直結する内容には適用しやすい一方、「民主主義」「素粒子」「正義」といった抽象概念について、その内容をどのように機能的に位置づけるかは難しい面があります。
もっとも、これら抽象概念の意味の由来はテレオセマンティクス以外の理論においても難問であり、心的内容の自然化全般に共通する課題と言えるでしょう。
実装上の困難
最後に、テレオセマンティクス的手法をAIに組み込む際の実装上の困難も指摘しておく必要があります。進化や強化学習を通じて内容を自動獲得させるには大量の計算資源と時間が必要であり、進化的に意味を獲得したAIを実現するハードルは高いです。
また、仮にそのようなAIが実現しても、今度は人間にとってその内部表象の意味を検証することが容易ではない可能性もあります。さらに、テレオセマンティクスを導入したAIの安全性や制御可能性も慎重に考える必要があります。
まとめ:AIの意味理解は哲学と工学の協働から
テレオセマンティクスは、AIの意味表象に新たな視座を提供する有力なアプローチです。進化的機能や目的という生物学的観点から「意味」を捉え直すことで、現在のAIが抱えるシンボルグラウンディング問題に対する一つの解答を示しています。
進化的ロボティクス、大規模言語モデルの再解釈、BDIアーキテクチャと強化学習の融合など、複数の研究方向が並行して進められており、いずれも「AIが真に意味を理解する」可能性を探る重要な試みです。
同時に、内容の不定性、歴史的選択過程の要請、抽象概念への対応、実装の困難さといった課題も明らかになっています。これらの課題に取り組むには、哲学的厳密さと工学的実装を統合する学際的アプローチが不可欠です。
AIの意味理解という問題は、単なる技術的課題ではなく、「意味とは何か」「理解とは何か」という根源的な哲学的問いと切り離せません。テレオセマンティクスという橋渡しを通じて、哲学と工学の協働がさらに深まることで、真に「意味を理解する」AIの実現に近づく可能性があるでしょう。
コメント