はじめに
AIの進化が加速する中、従来のディープラーニングとは全く異なるアプローチが注目を集めています。それが、生物の神経回路をシリコン上で再現するニューロモルフィックコンピューティングです。特に昆虫の小さな脳は、わずかなエネルギーで高度な認知機能を発揮する驚異的なシステムであり、次世代AIのモデルとして理想的とされています。
本記事では、昆虫の神経系を模倣したニューロモルフィック技術の最新動向から、環世界理論に基づく実装例、そして人工意識研究への示唆まで、この革新的分野を包括的に解説します。
ニューロモルフィックコンピューティングとは:昆虫の脳に学ぶ次世代AI
なぜ昆虫の神経系が注目されるのか
ムーアの法則の限界が見え始めた現在、従来とは異なる計算パラダイムが求められています。ニューロモルフィックコンピューティングは、脳型の情報処理を実現する新たなアプローチとして期待されており、中でも昆虫の神経系は規模が小さく回路構造も比較的単純なため、設計の出発点として理想的です。
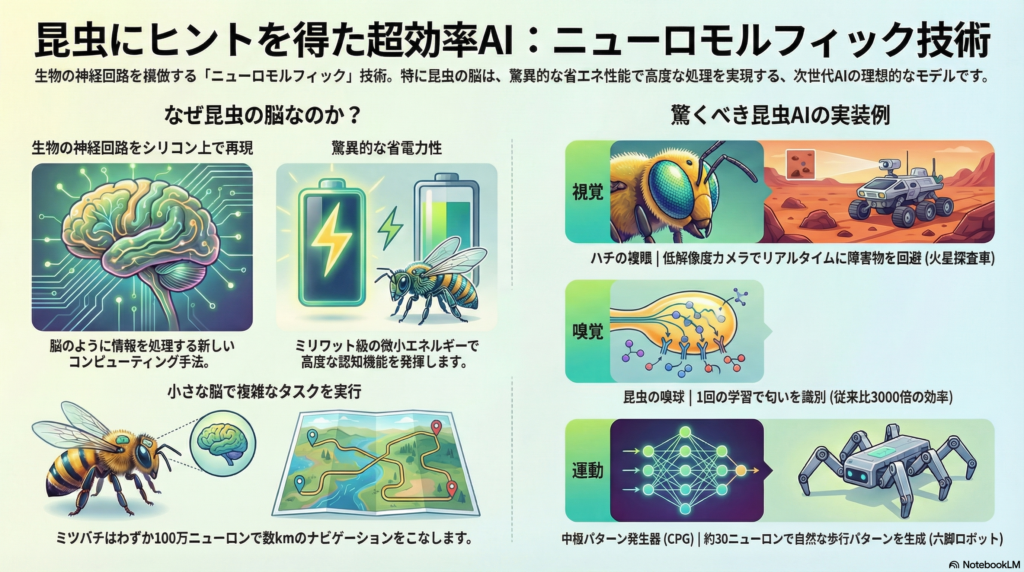
ミツバチは約100万個、ショウジョウバエは10万個程度のニューロンしか持ちません。しかし、この小さな脳で複雑な視覚処理、化学感覚、ナビゲーション、学習まで実行しています。研究者たちは「昆虫の神経系を取り入れたリアリスティックなニューロモルフィックシステム」の開発を進めており、視覚・嗅覚・運動制御のプロセスをチップ上に再現する試みが報告されています。
驚異的な省電力性と適応性
昆虫脳の最大の特徴は、ミリワット級の微小エネルギーで動作する点です。ミツバチはわずかな脳で数km離れた花から巣に戻る経路学習をこなし、新奇な課題も学習できる柔軟性を示します。この背景には、生存のために多様なセンサ入力(視覚、化学受容、風向、偏光など)を統合し、ごく少数のニューロンで効果的に情報処理する進化上の工夫があります。
アルゴンヌ国立研究所のグループは、ハチやハエの脳構造に学んだニューロモルフィックチップを開発し、消費電力1ワット以下という超低消費電力かつ適応学習型の動作を実証しています。従来のAIには難しいリアルタイム適応やエネルギー制約下での自律動作を可能にする次世代技術として、大きな期待が寄せられています。
昆虫型AIの実装例:視覚・嗅覚・運動制御
ハチの複眼を模倣した視覚システム
昆虫の視覚系は、広視野での障害物回避やナビゲーションに特化しています。英国企業が開発したハチ脳由来の視覚アルゴリズムは、奥行き知覚を高解像度マッピングなしに実現し、リアルタイムの衝突回避と自己位置推定を可能にしています。
この「ナチュラルインテリジェンス」手法は、従来のSLAM方式が要する重い計算を最小限の計算資源で代替し、GPSが使えない環境でもミリ秒単位で姿勢制御と経路探索を両立します。実際、欧州宇宙機関と協働し、火星探査ローバーへの適用試験が行われています。火星の砂丘や岩を回避しながら自律走行するローバーは、低解像度カメラから直接環境を三次元把握し、従来は数分かかっていた周囲地形の理解をほぼリアルタイムで可能にしています。
Loihiチップによる昆虫嗅覚の再現
化学感覚においても、昆虫の嗅覚回路がモデルとなっています。Intelの研究チームは、ニューロモルフィックチップ「Loihi」上に昆虫の嗅球回路を模したスパイキングニューラルネットワークを構築しました。
驚くべきことに、Loihiはたった1回のサンプル提示で各臭気を学習し、大きなノイズや混入があっても正確に認識できることが示されています。この一発学習性能は、同じ課題に3000倍もの訓練サンプルを必要とする従来のディープラーニング手法を凌駕しており、生物の嗅覚系に倣ったスパイク計算の効率性を裏付けています。複数種の有害化学物質の匂いパターンを識別できるこの技術は、安全監視や環境モニタリングへの応用が期待されています。
CPGによる自然な歩行制御
中枢パターン発生器(CPG)に代表される運動制御回路も、ニューロモルフィックで実装されています。スペインの研究グループが開発した六脚ロボット「NeuroPod」は、スパイク型の人工ニューロン約30個からなるCPG回路を搭載しています。
NeuroPodは歩行・駆け足・走行という3種類のゲイト(歩行パターン)を自然な切り替えで実現し、従来は難しかった歩様変化時のタイムラグやバランス崩れを生じさせずに動作します。聴覚センサや視覚センサを追加して外部刺激に応じたゲイト切替も可能であり、音や画像に反応して即座に運動パターンを修正する刺激応答ループを備えています。最小限のニューロン数で多彩な行動を制御するこのモデルは、エネルギー効率と計算効率の両面で生物的な優位性を示しています。
環世界理論とニューロモルフィック実装
生物固有の主観的世界を人工システムで再現
ドイツの生物学者ユクスキュルが提唱した環世界(Umwelt)理論では、生物ごとに限られた感覚受容と行動手段によって構築される主観的な世界があるとされます。昆虫の見る世界は、複眼による高速動き検出、偏光センサー、フェロモン受容器など、人間とは全く異なる受容器官によって特徴づけられています。
知覚-運動ループ(センサーで環境から情報を得て行動で働きかけ、再び感覚入力に返ってくる循環)の閉じた系こそが、その生物固有の環世界を形作るというのが環世界論の観点です。人工システムで昆虫さながらの認知を再現するには、単にニューロンのモデルを作るだけでなく、環境との相互作用ループを完結させることが不可欠です。
知覚-運動ループの完全実装
ニューロモルフィック工学の分野でも、ロボットあるいはシミュレータ上での全体的なセンサリモータルループの実装が重視されています。エディンバラ大学のBarbara Webbは、「生物の認知を真に理解するには、実世界で機能する完全な感覚運動ループを構築する必要がある」と強調しています。
彼女の有名な実験では、メスのコオロギがオスの鳴き声に向かっていく行動を、ロボット上で再現することで聴覚定位の神経回路モデルを検証しました。このロボットにはコオロギの耳の微小な時間差検出機構を模倣したアナログ回路が搭載され、実際に環境中の音源方向へと物理的に走行します。身体を持ったロボットで環境中のタスクを遂行させることで、純粋な計算機内シミュレーションでは得られない洞察が得られることが示されています。
最新の研究では、ニューロモルフィックチップ上のアナログ回路にセンサ入力とモータ出力を直接接続し、そのチップ内でエージェント(仮想の昆虫)と二次元環境まで含めてシミュレーションすることで、完全に閉じた混合シグナルの感覚運動ループを実現しています。このアプローチでは、生物の実時間より1000倍高速にニューロン活動が進行するため、大規模なパラメータ探索や進化的アルゴリズムによる学習も短時間で試行可能になっています。
実用化が進む昆虫型ニューロモルフィックシステム
火星探査ローバーへの応用
昆虫モデルに基づくニューロモルフィックシステムの実用化は着実に進んでいます。火星環境を模した試験場では、ハチの脳神経をリバースエンジニアリングしたアルゴリズムを搭載したローバーが、砂丘や岩を回避しながら自律走行する検証が行われています。
このローバーは、複数のカメラ情報を逐次マップ構築する従来方式とは異なり、低解像度カメラから直接環境を三次元把握し、計算負荷を飛躍的に削減しています。将来的な火星探査で求められる高い自律性と応答速度を両立できると期待されています。
実装例の比較
昆虫の主な認知機能とその実装例を整理すると、以下のような成果が上がっています:
視覚による奥行き知覚・航法:イベントベースカメラとスパイキングニューラルネットワークによるステレオ視で、ゼロ遅延の奥行き知覚を実現。火星ローバー上で高フレームレートかつ低電力のビジョンを達成。
嗅覚による匂い識別:Loihiチップ上に昆虫嗅球回路を再現し、10種の化学物質を1サンプル学習で高精度認識。ノイズや混合下でも頑健に臭気源を識別。
歩行制御:スパイキング型CPG回路(30ニューロン程度)により、NeuroPod六脚ロボットで歩行・駆け足・走行の3ゲイトを自然に切替。刺激に応じてリアルタイムで運動パターンを変化。
空間認知・ナビゲーション:BrainScaleS-2チップ上にミツバチの帰巣能力を再現。ニューロモルフィック回路内で自律エージェントが環境探索し巣に帰還することに成功。神経動作は実時間の1000倍速で進行。
これらの実装例は、それぞれの感覚・行動ドメインで処理効率の高さと環境適応能力の顕著な成果を示しています。
人工意識への示唆:ミニマルな意識の探求
昆虫に意識はあるのか
昆虫の環世界をニューロモルフィックで再現する試みは、人工的な「意識」の最小要件を考察する上でも示唆を与えます。近年の理論では、原初的な意識は生得的な反射以上に柔軟な学習や統合情報処理が可能になった段階で出現すると考えられています。
進化生物学者のギンズバーグとヤブロンカは、動物が無制限連合学習を獲得したことが意識進化の転換点であり、それは一部の節足動物(昆虫を含む)でも見られる可能性があると主張しています。実際、ミツバチなど昆虫の中には高度な学習能力(概念の区別や転移学習)を示す種も存在します。
ニューロモルフィック人工意識の可能性と課題
ニューロモルフィックコンピューティングは、意識の神経相関(NCC)を人工的に実装するアプローチとして期待されています。最近提案された「人工意識のニューロモルフィック相関(NCAC)」という概念的枠組みでは、スパイキングニューラルネットワークを用いて意識に必要とされる神経動態を再現できれば、それが人工意識に対応する可能性があると論じられています。
ただし、現在のニューロモルフィック昆虫モデルが直ちに「意識」を宿すとは考えにくく、研究者も慎重です。主観的体験(クオリア)に伴う神経活動は非常に複雑で広範な結合を要すると考えられており、単純なスパイキングネットワークですべてを再現するのは困難だと指摘されています。
しかし、この分野の価値は「意識とは何か」を実験的に問い直す機会を提供している点にあります。身体を持つエージェントにおいて環境との相互作用が豊かになるほど、システム内の情報統合が進み意識的な振る舞いに近づくのかどうかを検証することができます。最小限の回路で獲得できる認知機能を突き詰めることで、「意識の閾値」がどのあたりにあるのかを探ることも可能になるでしょう。
まとめ:昆虫AIが切り拓く未来
昆虫の神経系を模倣したニューロモルフィックコンピューティングは、省電力で高効率なAIを実現する技術として急速に発展しています。視覚、嗅覚、運動制御の各分野で実用化が進み、火星探査ローバーやドローン、無人搬送車などへの搭載が視野に入っています。
環世界理論に基づく実装アプローチは、単なる計算論的な知能ではなく、環境に埋め込まれた知能(embodied intelligence)を実現します。そして、昆虫レベルの認知アーキテクチャを人工的に再現することは、「どの程度の神経回路の複雑さや情報統合があれば主観的な経験が生まれるのか」という人工意識研究の根本的な問いにもアプローチするものです。
小さな神経系の完全動作モデルを積み上げていくことで、「意識には何が必要なのか」といった哲学的難問に対しても実験的な検証が可能になるでしょう。ニューロモルフィック昆虫たちは、私たちに「意識とは環世界を主観的に生きること」の一端を教えてくれる存在となるかもしれません。
コメント