マルコフ毛布の動的再構成と拡張心——「自己の境界」はどこまで動くのか
はじめに:「自己」の輪郭は固定されていない
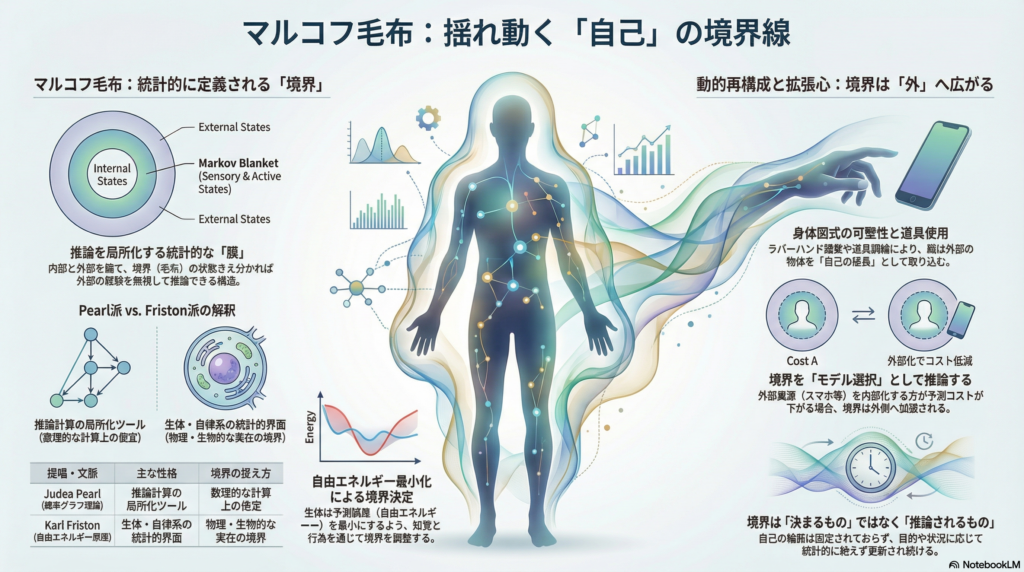
私たちが「自分」と「外の世界」を区別するとき、その境界はどこにあるのか。皮膚の表面だと直感的には思われがちだが、道具を使いこなすとき、スマートフォンで記憶を外部化するとき、あるいはVR空間で別の身体を操るとき、その直感は簡単に揺らぐ。
認知科学・神経科学・哲学にまたがる現代の研究は、この「主体の境界」が静的な輪郭ではなく、状況と時間に応じて動的に再構成される統計的・機能的な面であることを示しつつある。その中心にあるのが、**マルコフ毛布(Markov blanket)**という概念だ。
本記事では、マルコフ毛布の基本構造から動的再構成の数理モデル、身体図式や拡張心(extended mind)との接続まで、研究上の論点を横断的に整理する。認知神経科学・人工知能・ロボティクス・哲学に関心をもつ読者が、この領域の地図を描けることを目指す。
マルコフ毛布とは何か——推論を局所化する「統計的境界」
条件独立性による境界の定義
マルコフ毛布の出発点は確率論にある。変数の集合において、ある部分集合(内部)と残り(外部)が、特定の集合(毛布)を条件として統計的に独立になるとき、その中間の集合をマルコフ毛布と呼ぶ。
数式で表すなら、内部状態 μ、外部状態 η、毛布状態 b に対して
p(μ, η | b) = p(μ | b) · p(η | b)が成り立つ状況だ。この条件が満たされると、内部は毛布越しにしか外部の情報を得られない。逆に言えば、毛布さえ知っていれば、内部の推論に外部の詳細は不要になる。この「推論の局所化」こそが、マルコフ毛布が計算論的神経科学で注目される理由の一つだ。
PearlのMarkov blanketとFristonのMarkov blanket
注意すべき重要な区別がある。確率グラフ理論(Judea Pearl らの文脈)でのマルコフ毛布は、あくまで推論計算の局所化ツールであり、世界の「実在する境界」を主張するものではない。
一方、Karl Friston らが自由エネルギー原理(Free Energy Principle, FEP)で採用するマルコフ毛布(Friston系)は、生体・自律系の内外を隔てる統計的界面として実在論的に読み解こうとする。この読み替えには強力な統合力がある反面、形式(数学)から形而上学的結論(「心はここまで」など)を過度に導き出すリスクが哲学者たちから指摘されている。この区別を意識しておくことが、議論の誤読を防ぐ第一歩になる。
自由エネルギー原理と能動的推論——境界が「目的関数」で決まる
変分自由エネルギーと推論の境界
自由エネルギー原理では、生体は変分自由エネルギー F を最小化するように知覚・行為を調整すると考える。
F[q] = E_{q(x)}[ln q(x) − ln p(o, x)]ここで p(o, x) は生成モデル(観測 o と隠れ状態 x の結合分布)、q(x) は近似事後分布だ。この式を変形すると、自由エネルギー最小化は(i)近似事後を真の事後に近づけること(推論の精度)と(ii)モデル証拠(観測のもっともらしさ)を高めることの、二重の目的を同時に追うことに等しいと理解できる。
境界(マルコフ毛布)の観点からは、どの状態を「内部」として扱うかが、この目的関数をどう最小化するかに直結する。境界は形而上学的に固定されているのではなく、推論の目的と精度配分によって実用的に変わり得る——これが動的再構成を考える上での出発点だ。
期待自由エネルギーと行為選択
能動的推論(active inference)はこれをさらに進め、将来にわたる期待自由エネルギー G(π) の最小化として行為方策 π を選択する。この枠組みでは、情報獲得(探索)と目標達成(利用)が同一の目的関数から導かれ、「どの境界を選ぶか」もモデル選択の問題として取り扱うことができる。
動的再構成の数理——境界は「推定対象」になる
三つのルートで考える動的境界
境界が固定でなく時間変化するとき、その扱いには少なくとも三つの数理的アプローチがある。
ルート①:軌道上の毛布
マルコフ毛布を定常分布の性質としてではなく、時間発展(軌道・パス)に付随する条件独立性として定義する。マクロな物体の同一性を「境界パスの統計」で定義すると、内部の素材が変わっても境界統計が同じなら同型とみなせる、という発想だ。これは「物体とは何か」を素材ではなく相互作用パターンで規定しようとする視点と重なる。
ルート②:割当変数による潜在的推定
各微視要素が「内部/境界/環境」のどの役割を担うかを示す割当変数 ω(t) を時間発展する潜在変数として導入し、変分ベイズEM(VBEM)で推定する。階層隠れマルコフモデル(factorial HMM)の形式で定式化できる。
ルート③:無教師の動的マルコフ毛布検出
Beck & Ramstead(2025年)らが提案したアルゴリズムは、微視的なダイナミクスから「物体(マクロな境界を持つ実体)」を無教師で分節し、境界が時間とともに移動・交換・吸収される様子を追跡する。象徴的なデモとして、ニュートンのゆりかごの衝突局面において、周辺球が一時的に境界として「ラベル付け」され、運動量の伝達とともにラベルが入れ替わることが示されている。
入れ子の毛布——多重スケールの境界
自律系・生命系の議論では、マルコフ毛布が「細胞→器官→個体→局所環境」という階層で入れ子になり得ることが指摘されている。重要なのは、この入れ子構造が生物の物理的境界(皮膚など)と必ずしも一致しない点だ。場合によっては、身体の外にある道具や環境の一部が、より大きな系の「内部」として機能することがある。この「外へ開く境界」こそ、拡張心との接続点になる。
実証研究:身体境界の可塑性は証明されているか
道具使用と身体図式の再編
道具を使うとき、脳は道具先端を「自己の延長」のように扱うことがある。Maravita & Iriki(2004年)などのレビューは、サルの単一ニューロン記録やヒトの行動・神経心理データをもとに、道具訓練が近身空間(peripersonal space)や身体図式(body schema)を更新することを示している。道具の長さ・訓練量・フィードバックの有無が境界の変化を引き起こすパラメータになる。
ラバーハンド錯覚と多感覚統合
Botvinick & Cohen(1998年)が報告したラバーハンド錯覚(rubber hand illusion, RHI)は、視覚と触覚の同期刺激によって偽の手を「自分の手」のように感じる現象だ。fMRIを用いた研究では、錯覚の強さが前運動野や頭頂葉の活動と相関することが示されており、多感覚統合が身体所有感(body ownership)の神経基盤となっていることが明らかになっている。
これらの知見は、身体境界が「固定された皮膚の線」ではなく、感覚運動ループの整合条件によって動的に変わることを強く示唆する。
精度制御と感覚減衰——情報処理としての境界
自由エネルギー原理の語彙では、予測誤差の「重み付け(精度)」を調整することで、どの感覚信号を自己更新に使い、どれをノイズとして捨てるかが制御される。能動的な運動中には感覚信号が抑制される(感覚減衰)が、これは「自己生成の刺激を外部信号と区別する」メカニズムとして解釈できる。
計算論的精神医学の観点では、この精度制御の変調が統合失調症やASDの知覚特性(錯視の起こりにくさなど)の説明に応用されており、**境界は空間的な内外だけでなく、情報処理上の「エビデンス境界」**としても理解できることが示唆されている。
拡張心との統合——「境界のモデル選択」として
拡張心の核心と三つの立場
Clark & Chalmers(1998年)が提唱した拡張心(extended mind)の主張は、「外部要素が適切な結合条件のもとで内的過程と同等の認知的役割を担うなら、その要素は認知過程の一部である」というものだ。ノート、スマートフォン、パートナーとの会話——これらが記憶・推論・判断の一部を担っているなら、「心」はそこまで広がると言えるか、というのが問いの核心だ。
マルコフ毛布との接続については、大きく三つの立場が分かれる。
- 内在主義的読み:推論の自己証明性から、脳と環境の間に証拠境界が必要であり、心は頭蓋内に収まるという解釈。
- 外在主義的読み(可塑・多重境界):マルコフ性は唯一・固定の境界を要請せず、境界の多重性・可変性こそがEmbodied/Extended認知の直観と整合するという反論。
- 批判的整理:Pearl系とFriston系の混同を戒め、形式から形而上学へ「飛躍」することの危うさを強調する立場(Bruineberg らの「Emperor’s New Markov Blankets」など)。
統合仮説:境界をモデル選択として推論する
本領域の研究が向かう方向として、次の統合仮説が生産的だと考えられる。
主体境界は固定された輪郭ではなく、主体が用いる生成モデルにおける状態分割の選好であり、変分自由エネルギー(観測説明)と期待自由エネルギー(将来の達成・探索)を下げる方向に、学習と行為を通じて更新される。
この仮説のもとでは、外部資源(ノート・道具・端末)が十分に強い双方向結合と低遅延・高信頼のアクセスを備えるとき、より大きな系の「内部状態」として最適化される——すなわち拡張心が実現される——と予測できる。
重要なのは、拡張心の「パリティ原理」(外部と内部を機能的に対等とみなす基準)を、直観ではなく期待自由エネルギーの差として再表現できる可能性がある点だ。外部資源を内部化することでモデル複雑性は増えるが、予測誤差・曖昧性・期待コストが低下するなら、総合的に有利になり得る。
一方で、「マルコフ毛布だけでは裁定できない」という批判を受けて、この統合仮説は追加の選好原理(オッカム則・境界統計の安定性・低次元性など)を含む形で立てる必要がある。
実験・シミュレーション設計の方向性
統合仮説を反証可能にするには、「境界が動的に再構成されたこと」を示せる観測指標の設計が鍵になる。複数のモダリティを組み合わせた検証が考えられる。
**ヒト行動実験(道具×遅延×信頼性)**では、道具先端と手のフィードバックの遅延やノイズ量を操作し、身体図式への取り込みの閾値を推定する。低遅延・高信頼の条件で境界拡張が促進され、訓練で持続化するという予測が立てられる。
EEG/MEGによる精度制御測定では、能動運動と受動運動を比較しながら予測誤差指標(MMNなど)を計測し、外部資源を使用したとき精度の重み付けがどう再配分されるかを追う。
fMRI・有効結合の推定では、RHIやVR身体所有感課題で所有感を操作し、前運動野・頭頂葉などの結合変化と錯覚強度の相関を調べる。
ロボット実装では、着脱可能なセンサや外部メモリを段階的に追加し、オンライン適応課題での性能変化を評価する。外部メモリが低遅延・高可用であるほど、少データでの実時間適応が改善するという予測が検証対象になる。
シミュレーションでは、動的マルコフ毛布検出の枠組みで微視要素に割当変数を置き、接触・情報流切替の局面で境界ラベルがどう変化するかをELBOや境界統計の安定性で評価する。
まとめ:境界は「決まるもの」ではなく「推論されるもの」
本記事で整理した論点を振り返ると、次の四点が核心になる。
第一に、マルコフ毛布は「推論の局所化ツール(Pearl系)」と「世界の統計的境界(Friston系)」の間に意味論的な差異があり、この区別を保ちながら議論を進めることが不可欠だ。
第二に、動的再構成は「境界の所属が変わる」「複数の境界が同時成立する」「スケールや目的によって採用すべき境界が変わる」という三層の問題として分解でき、それぞれに異なる数理的アプローチが対応する。
第三に、身体図式・ラバーハンド錯覚・精度制御などの実証研究は、境界が感覚運動ループの整合条件として動的に変わることを支持しており、これは「境界=固定の皮膚」という直観を覆す強い根拠になる。
第四に、拡張心との統合は「形而上学の決着」ではなく「境界ダイナミクスの推定問題」として再構成することで、経験科学上の検証可能な仮説になり得る。
主体の境界がどこにあるのかという問いは、哲学の思弁にとどまらず、認知神経科学・人工知能・ロボティクスが交差する実践的な設計問題として、今後ますます重要度を増していくだろう。
コメント